Making of NX13
Agenda
1. Overview
2. Components
3. About M5Atom
4. Designed by Fusion 360
5. Assembly
6. Control App for macOS
7. Control by Blynk
8. Sketch
9. Motion check
1. Overview
I made a biped robot with the smallest M5Atom series M5Atom Matrix in the M5Stack series.
2. Components
1)M5Atom
2)Servo FITEC FS90 x6
3)Battery x3
The wiring is as follows.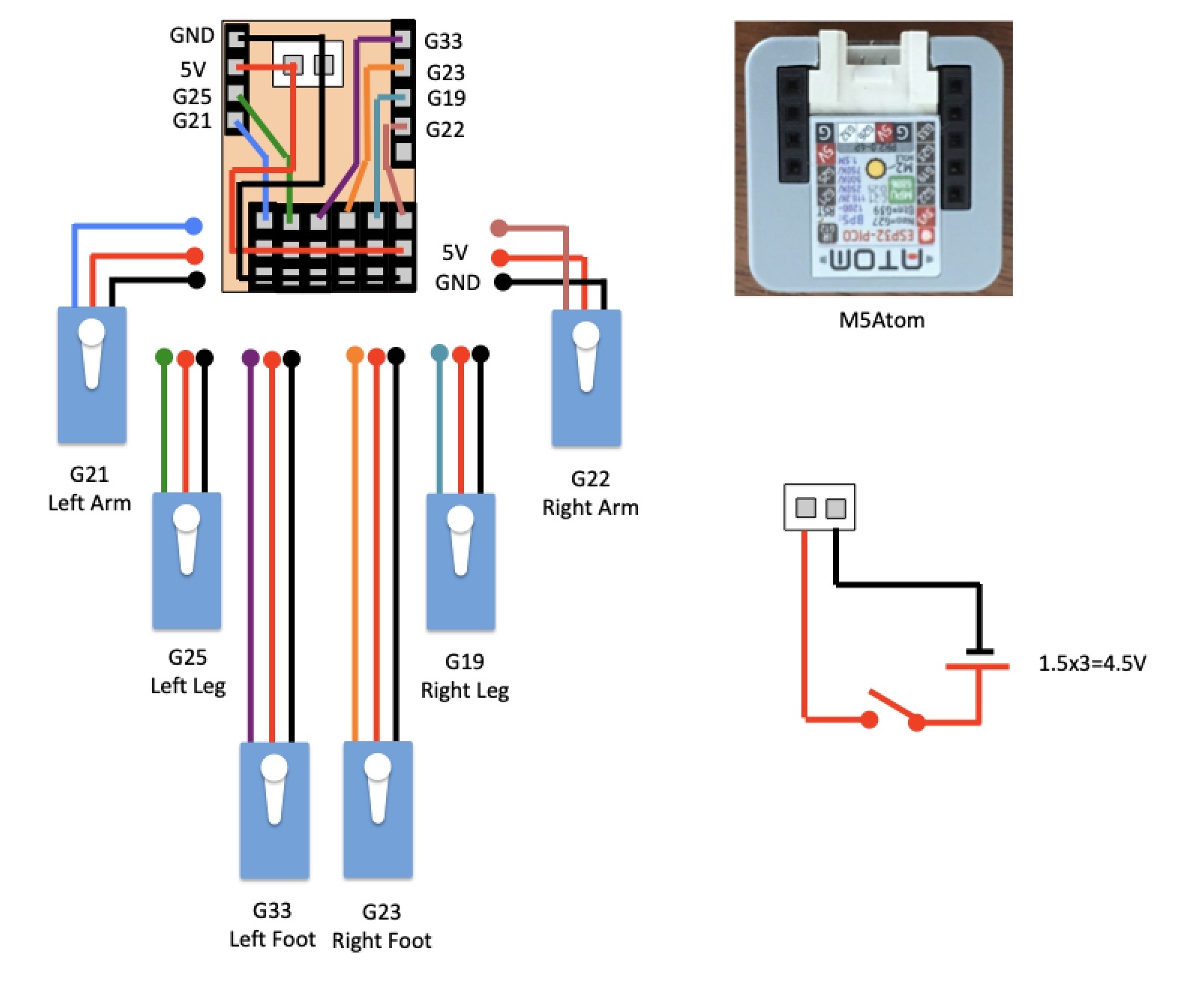
3. About M5Atom
I wrote about M5Atom on my blog, so please see here.
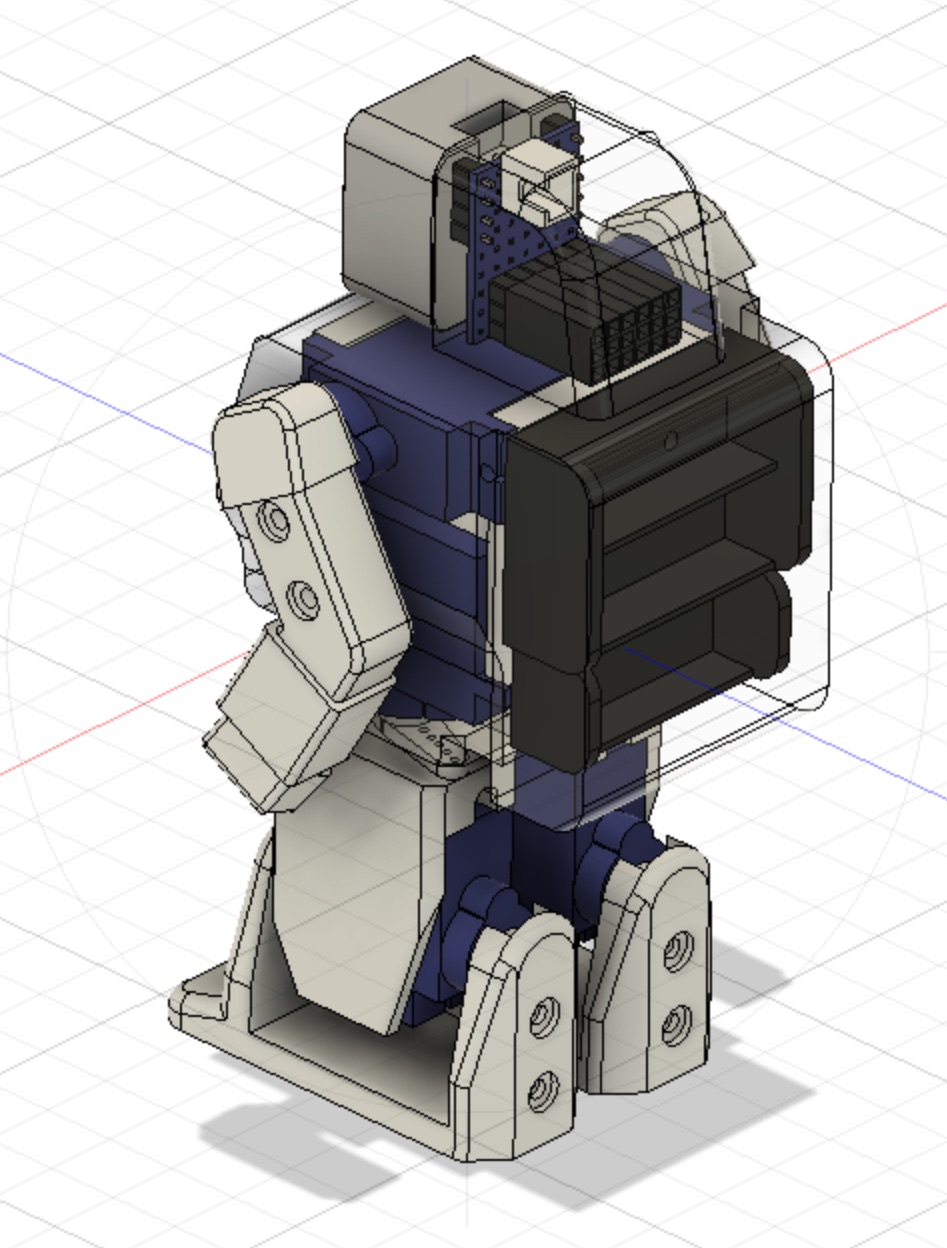
4.Designed by Fusion 360
I used Fusion 360 for structural design.


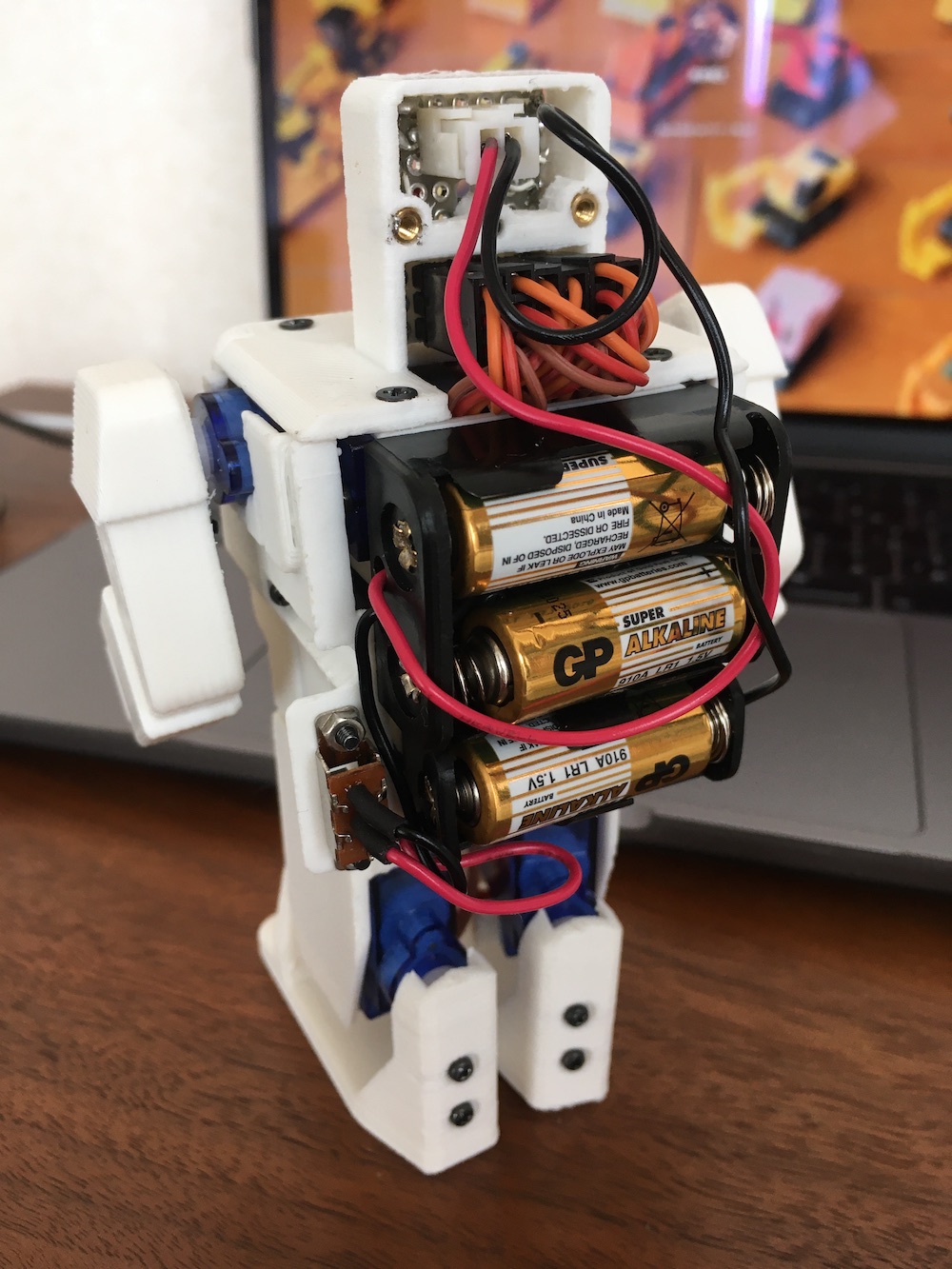
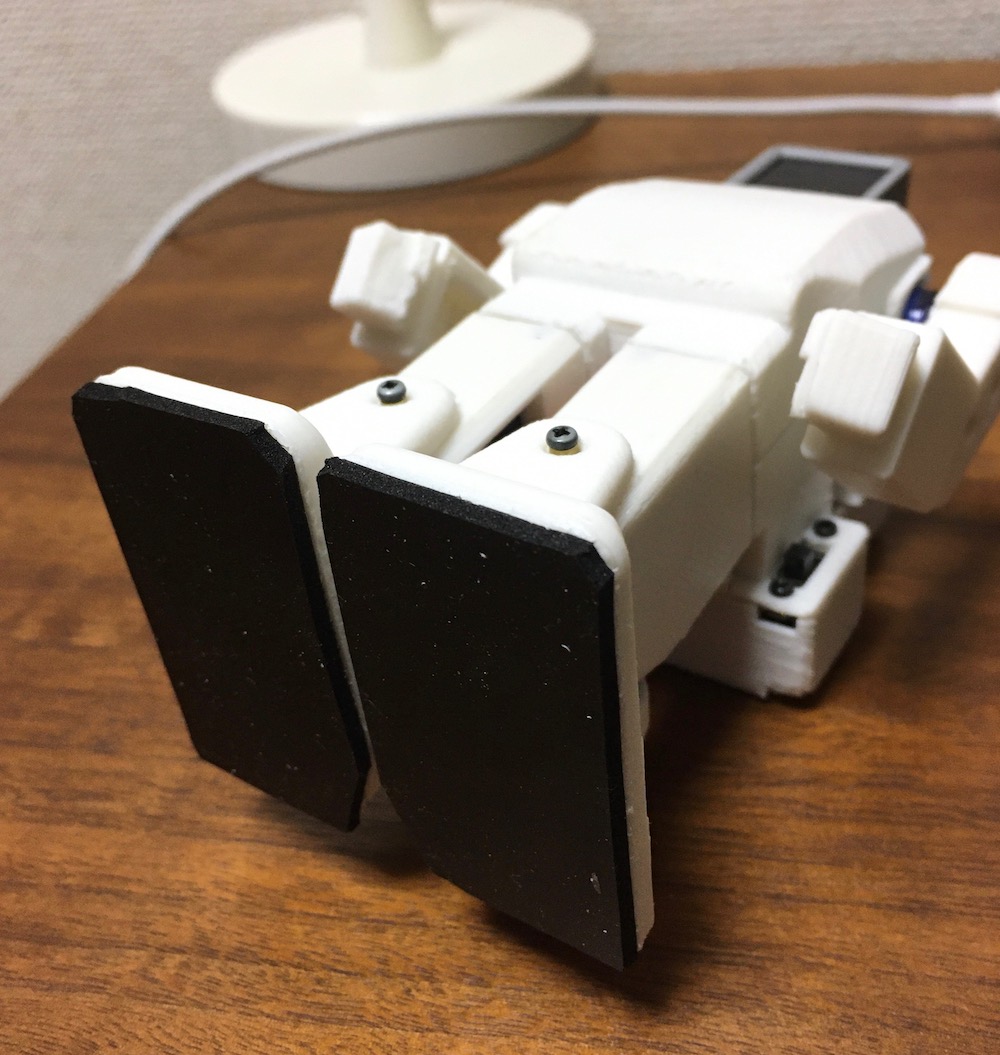
5.Assembly
During assembly, I had a hard time pushing the servo cable.
Rubber is attached to the soles of the feet to prevent slipping.

5.Control App for macOS
This time I created the motion using my own macOS application.

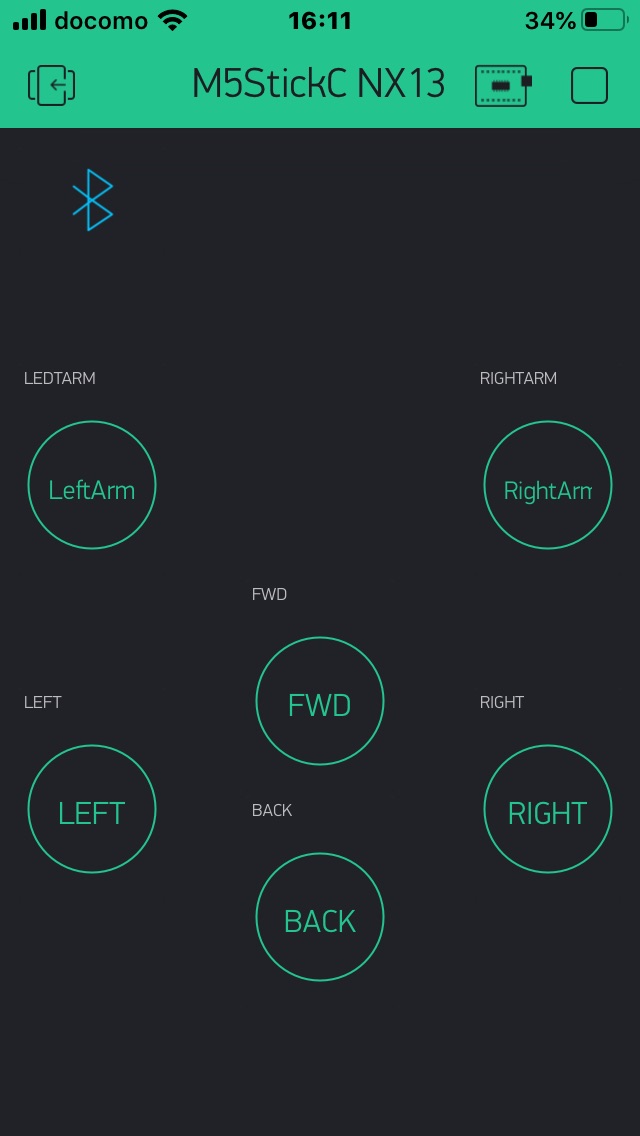
6.Control by Blynk
This time, the control uses the iPhone application called Blynk.
I wrote about Blynk on my blog, so please refer to it.
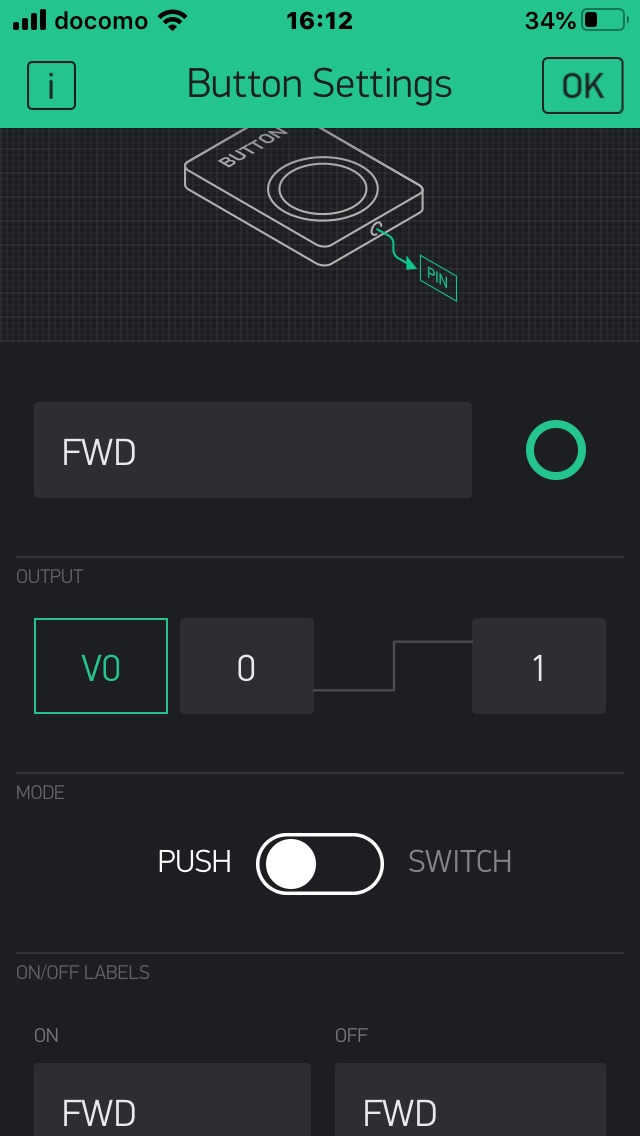
Blynk uses 6 buttons.
7.Sketch
I wrote Sketch of details on the blog, so please refer to that.
Sketch for motion creation
Sketch for Blynk
8.Motion check
The robot can walk forward and backward, walk left and right, and raise and lower the left and right hands according to the operation of Blynk.
Update
- 2020.6.21Created a page for making of bipedrobot with M5AtomNEW