Making of NX18
Agenda
1. Overview
2. Components
3. About M5Atom
4. Designed by Fusion360
5. Assembly
6. Control App for macOS
7. Control by Dabble
8. Sketch
9. Motion check
1. Overview
I made a biped robot with the smallest M5Atom series M5Atom Matrix in the M5Stack series.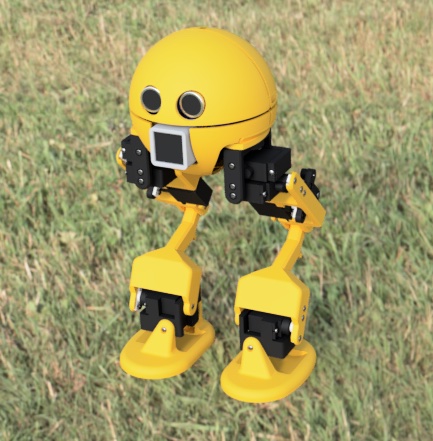

2. Components
1)M5Atom Matrix
2)Servo TowerPro MG90D x6
3)Battery Lithium Ion 16340(With protection circuit)x13
4)PCA9685Servo driver board
5)DCDC board LXDC55
6)Ultrasonic distance sensor HC-SR04
The wiring is as follows.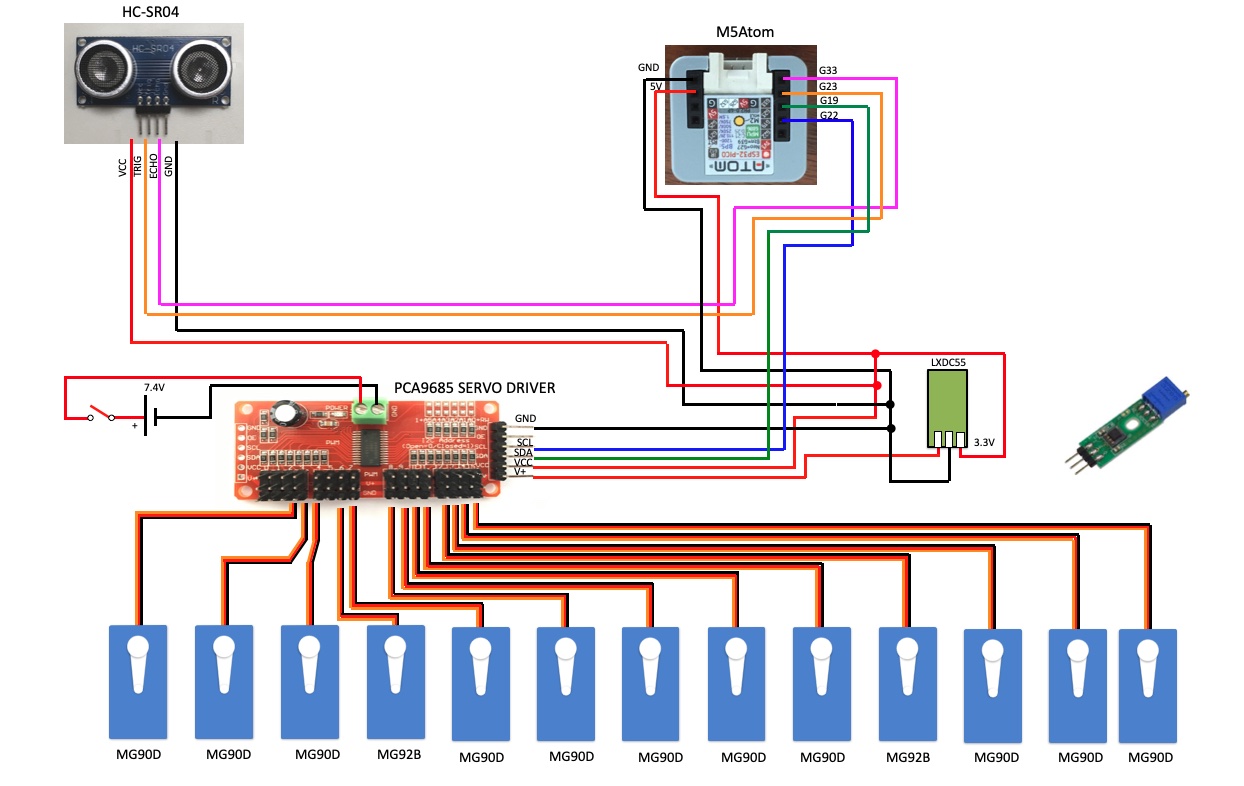
3. About M5Atom
I wrote about M5StickC on my blog, so please see here.
4.Designed by Fusion360
I used Fusion 360 for structural design.

Also, I put the STL for 3D printed parts on GitHub, so please refer to it.
STL for 3D printed parts Github
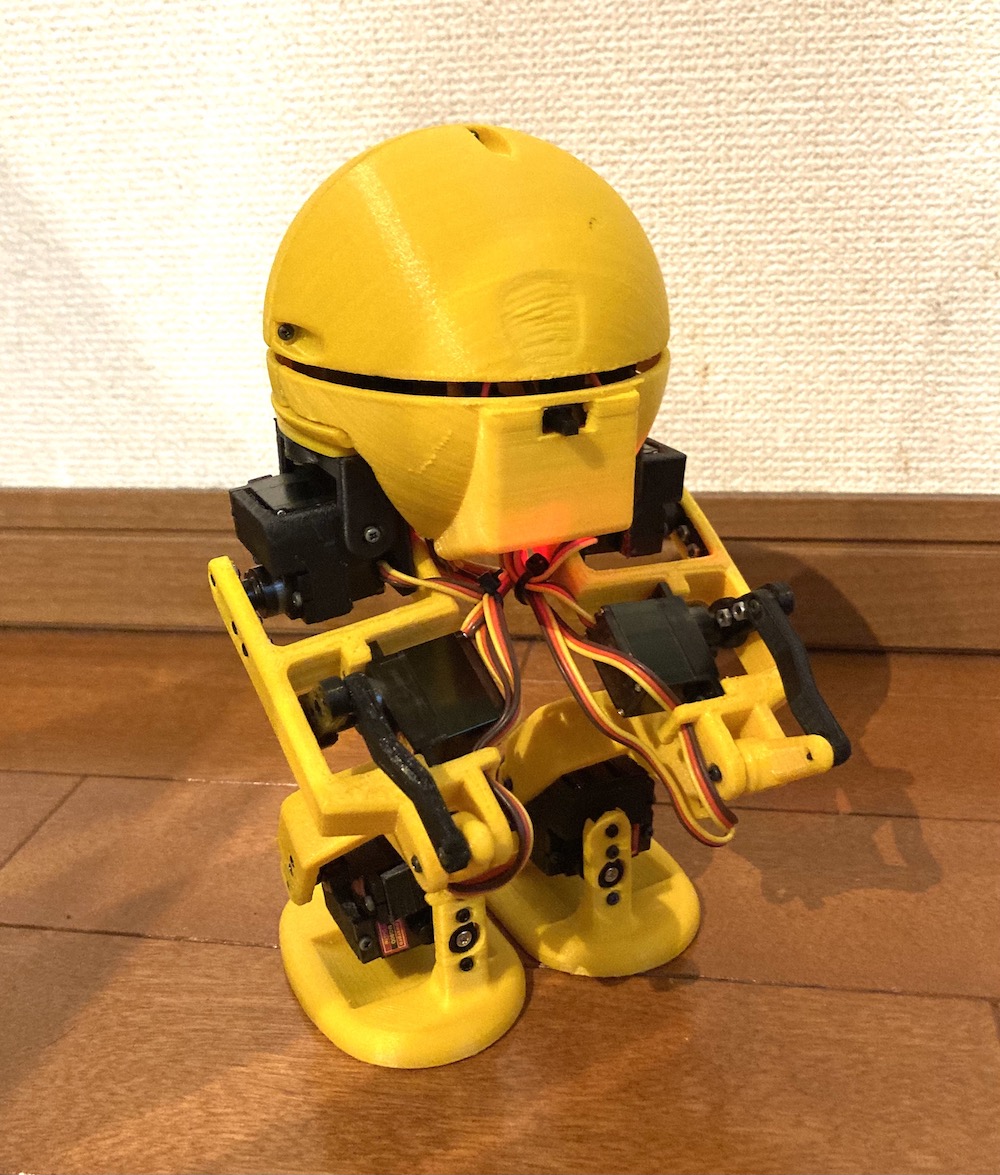
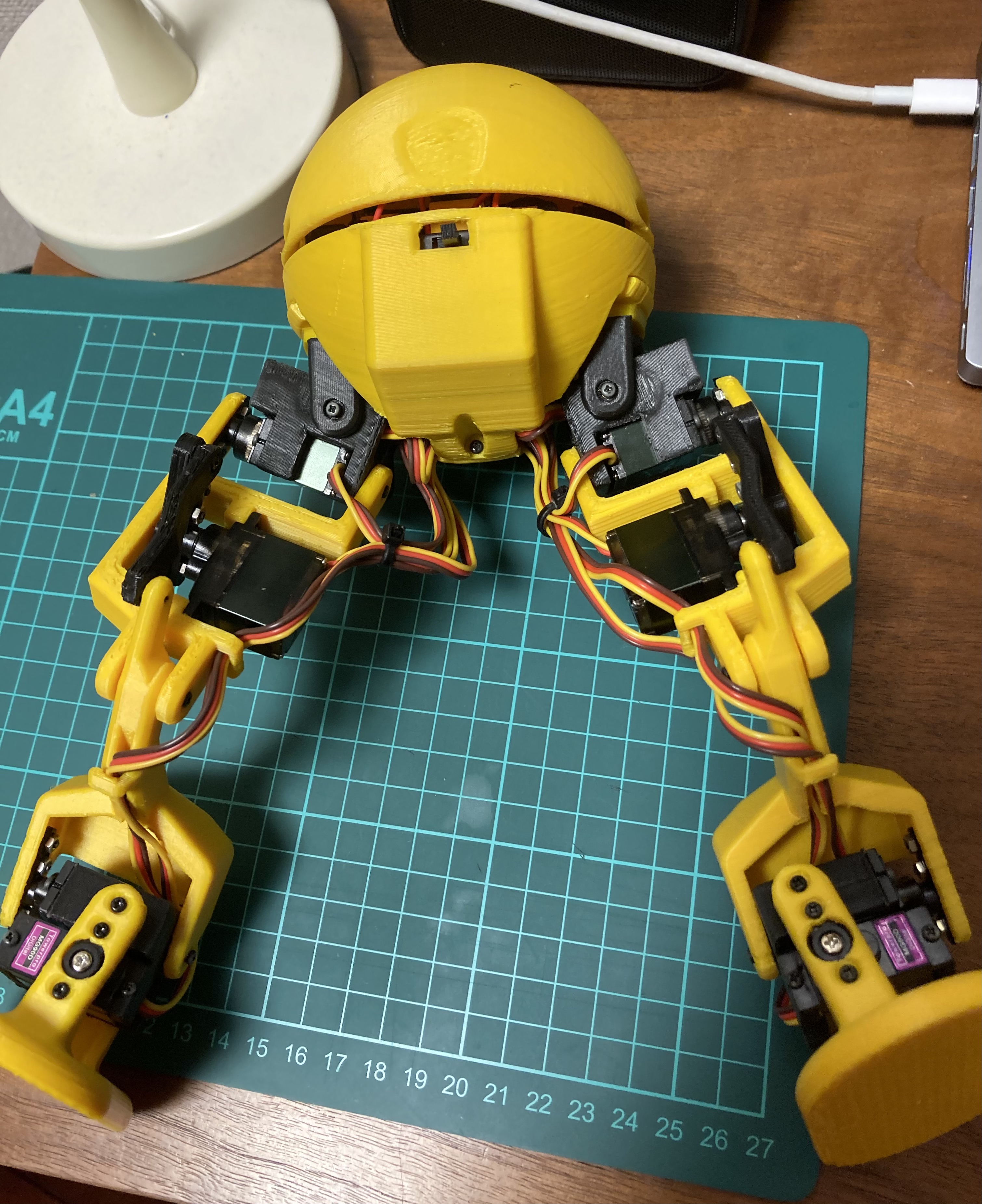
5.Assembly
The contents were pushed in like this.



Servo cables are cut and bundled.
5.Control App for macOS
This time I created the motion using my own macOS application.


6.Control by Dabble
This time, the control uses the iPhone application called Dabble.
I wrote about Dabble onmy blog, so please refer to it.

7.Sketch
I wrote a detailed sketch on Github, so please refer to that.
Walking motion sketch Github
8.Motion check
It can be operated with Dabble to walk back and forth, walk left and right, and swing left and right.
It can move back and forth, left and right, turn left and right continuously
Added motion to avoid obstacles with ultrasonic distance sensor
Move the center of gravity using M5Atom's IMU
Update
- 2022.8.27Add some videosNEW
- 2022.7.8Created a page for making of bipedrobot with M5Atom<