Making of NX12
Agenda
1. Overview
2. Components
3. About M5StickC
4. About 360 degree rotation servo
5. Mecanum wheel design
6. Mecanum wheel control
7. Blynk
8. Sketch
9. Motion check
1. Overview
I made a copy of the Mecanum Wheel Rover.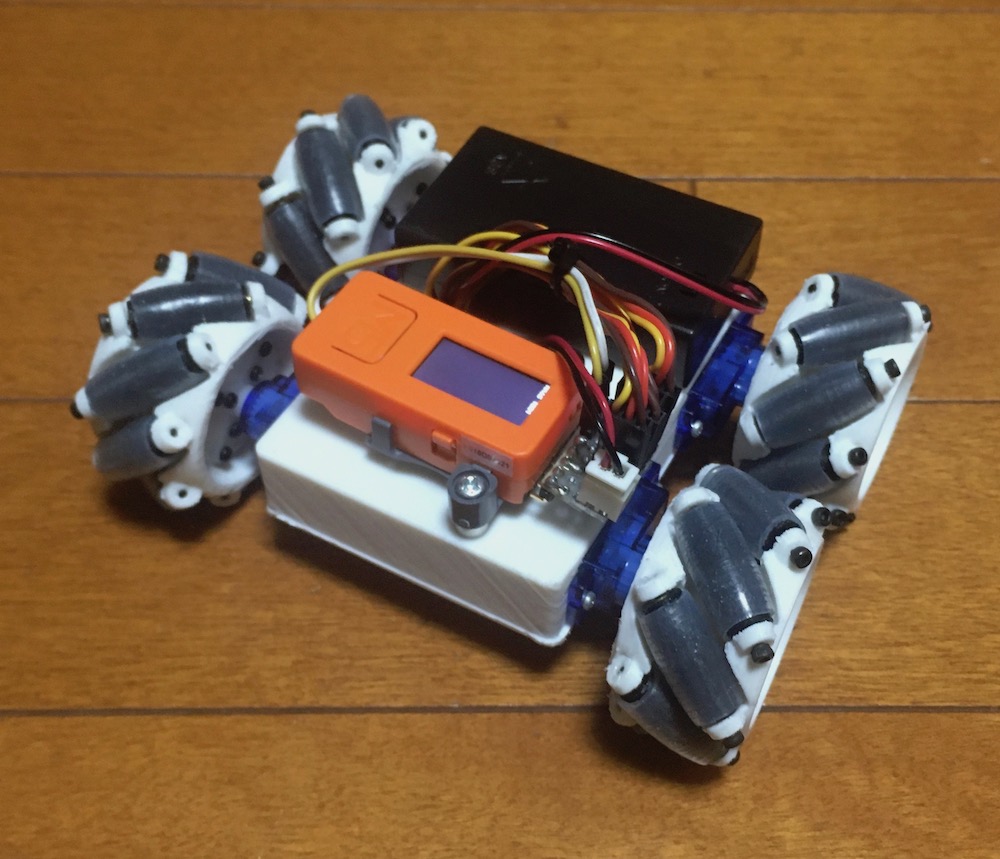
2. Components
1.M5StickC
2)360 degree rotation servo TowerPro SG90-HV x4
3)Homemade mecanum wheel set
4)Battery AAAx3 and battery box with switch
3. About M5StickC
I wrote about M5StickC on my blog, so please see here.
4.About 360 degree rotation servo
This time I used 360 degree rotation servos. TowerPro SG90-HV It is a very inexpensive servo and easy to use.

The wiring is as follows.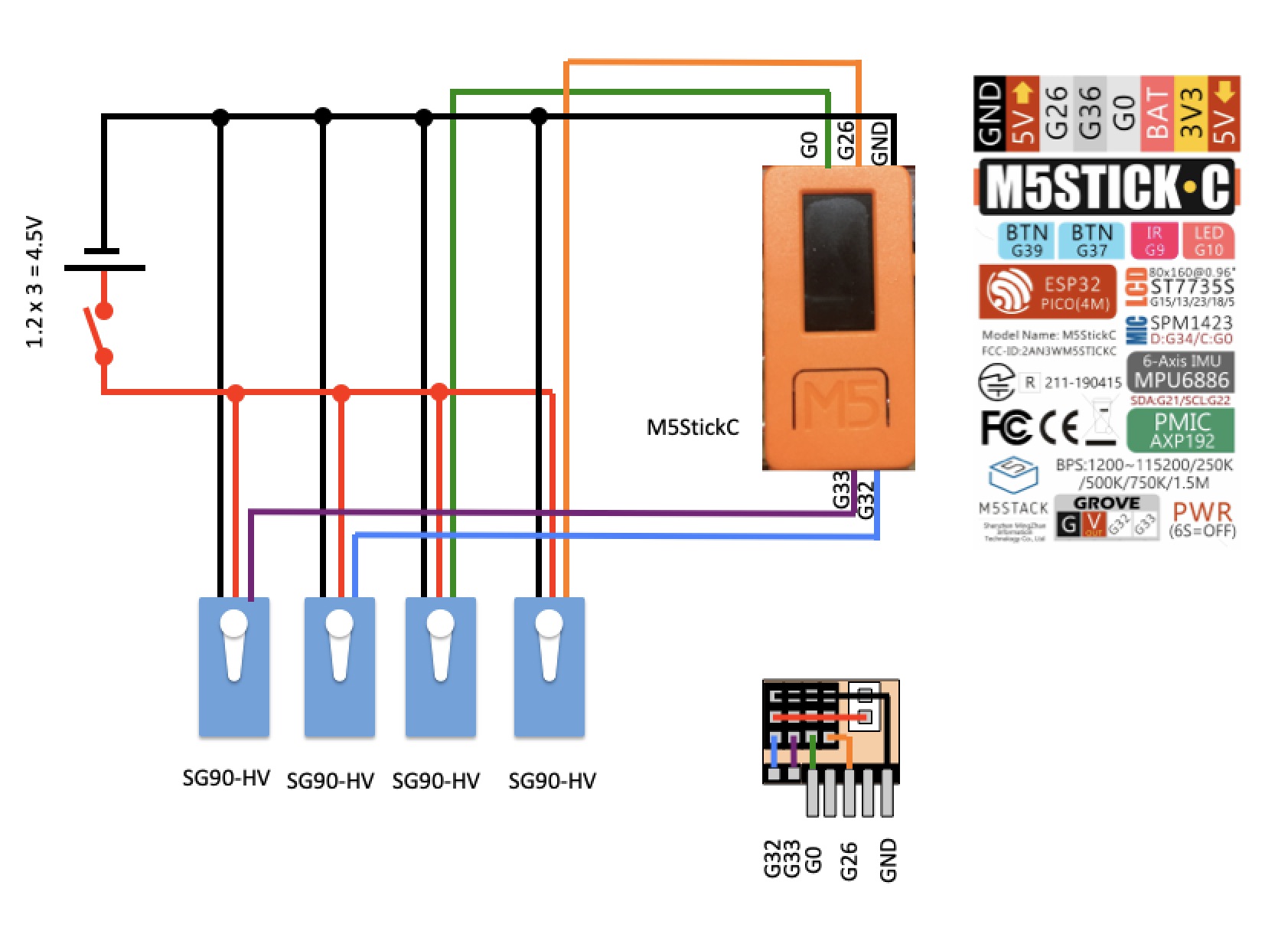
The wiring to the servo is made by connecting a HAT.
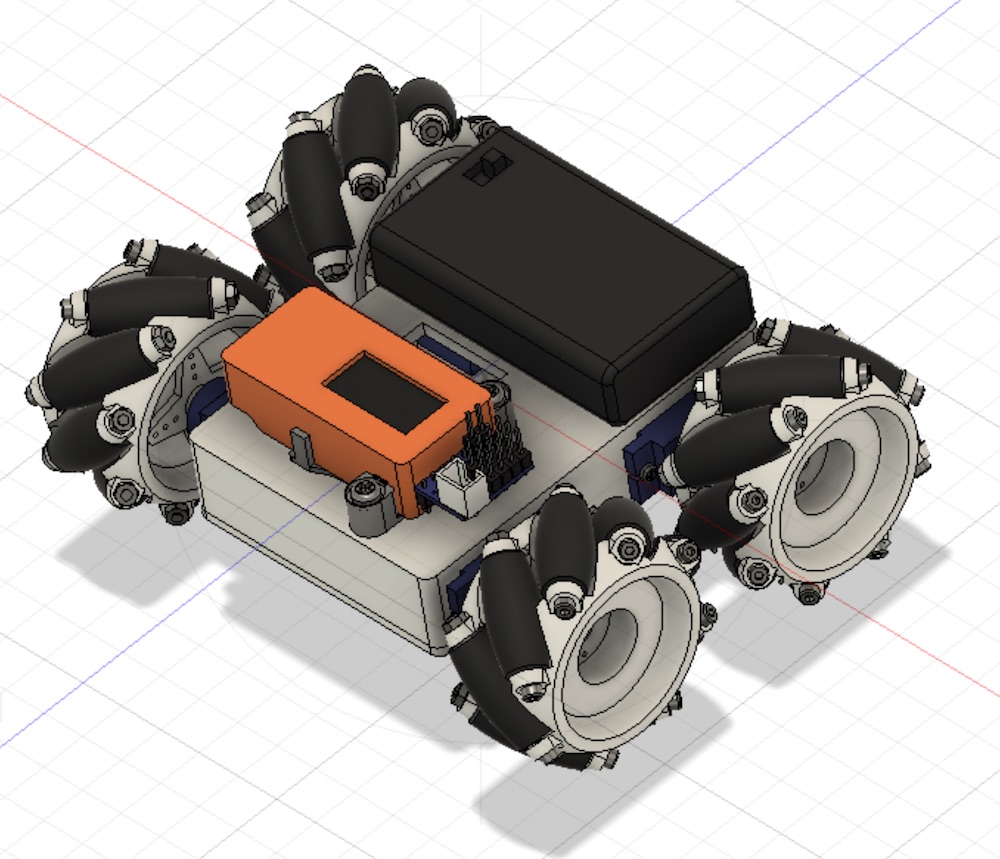
5.Mecanum wheel design
The Mecanum wheel has rollers that are tilted 45 degrees around the outer circumference of the wheel. I use 2 sets of 2 types.
The rollers are circular when viewed from the side.



The 3D printed parts look like this.

The roller is covered with a silicone tube to prevent slipping.

The appearance of the rover looks like this.
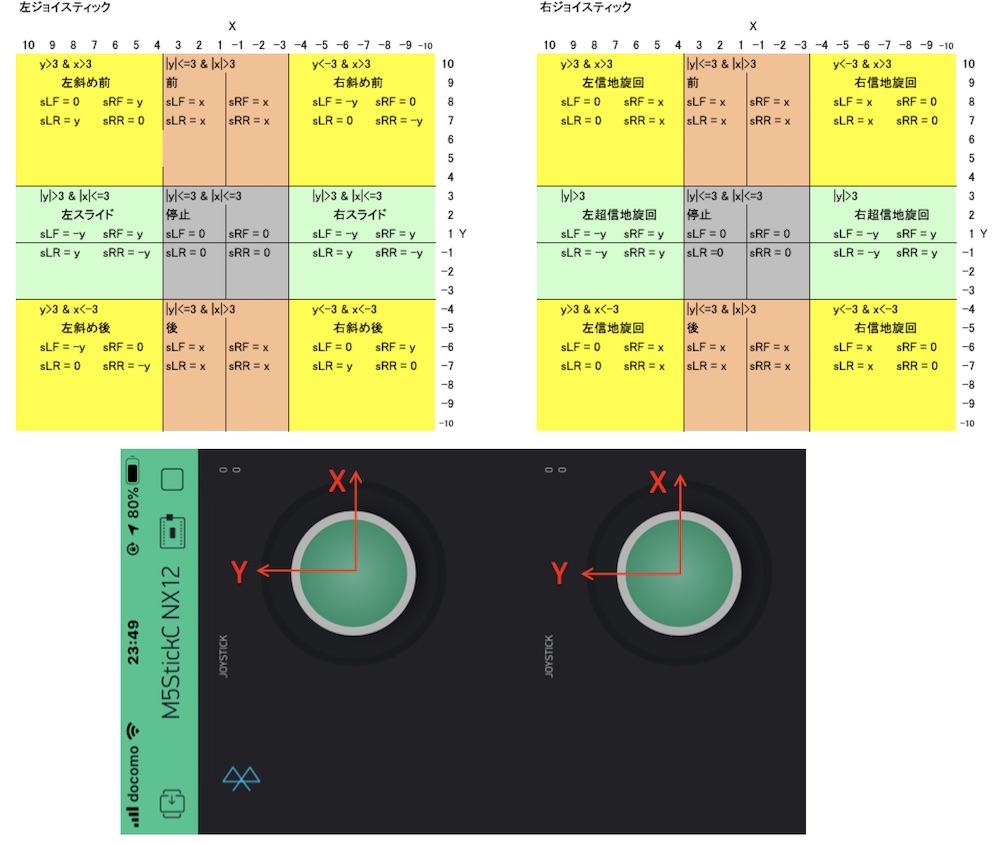
6.Mecanum wheel control
If you rotate each wheel independently as shown in the figure, you can freely move it back and forth, left and right.

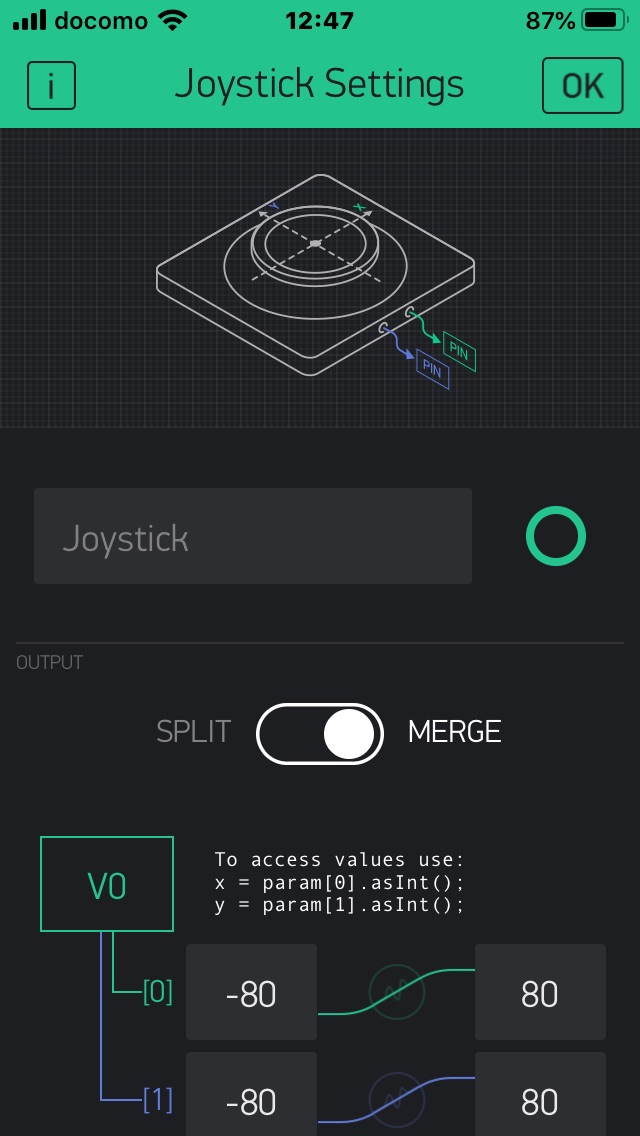
7.Blynk
This time, the control uses the iPhone application called Blynk.
I wrote about Blynk on my blog, so please refer to it.
BI use two joysticks in Blynk.
8.Sketch
See the blog for a detailed sketch.
9.Motion check
You can rotate back and forth, left and right according to the operation of Blynk.
Update
- 2020.6.7Created a page for making of mecanum wheel rover made with M5StickCNEW