2020.6.7
NX12の製作
アジェンダ
1. 概要
2. 構成
3. M5StickCについて
4. 360度回転サーボについて
5. メカナムホイールの設計
6. メカナムホイール制御
7. Blynkでコントロール
8. スケッチ
9. 動作確認
1. 概要
メカナムホイールを見よう見まねで作ったのでローバーのしました。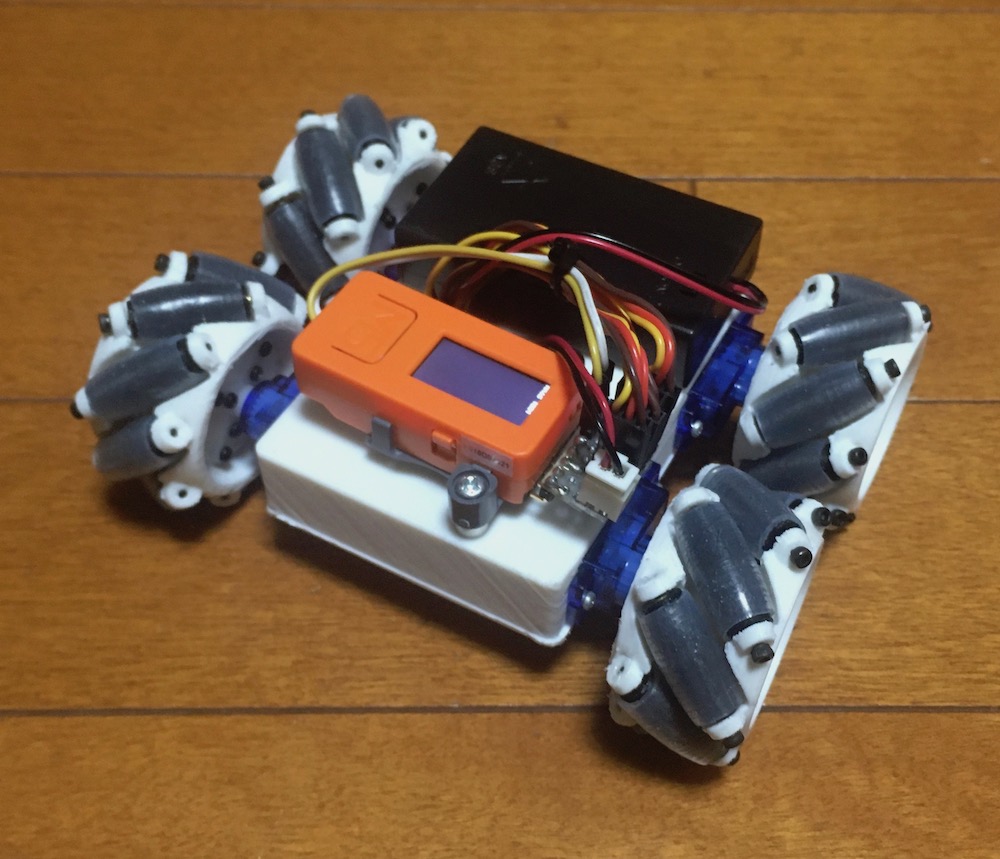
2. 構成
1.M5StickC
2)360度回転サーボ TowerPro SG90-HV x4
3)自作メカナムホイールセット
4)電池 単4x3 スイッチ付きの電池ボックス
3. M5StickCについて
M5StickCについてはブログの方で書きましたので、こちらを参照してください。
4.360度回転サーボについて
今回は360度回転するサーボを使用しました。TowerPro SG90-HV とても安価なサーボで使いやすいです。

結線は以下のようにしています。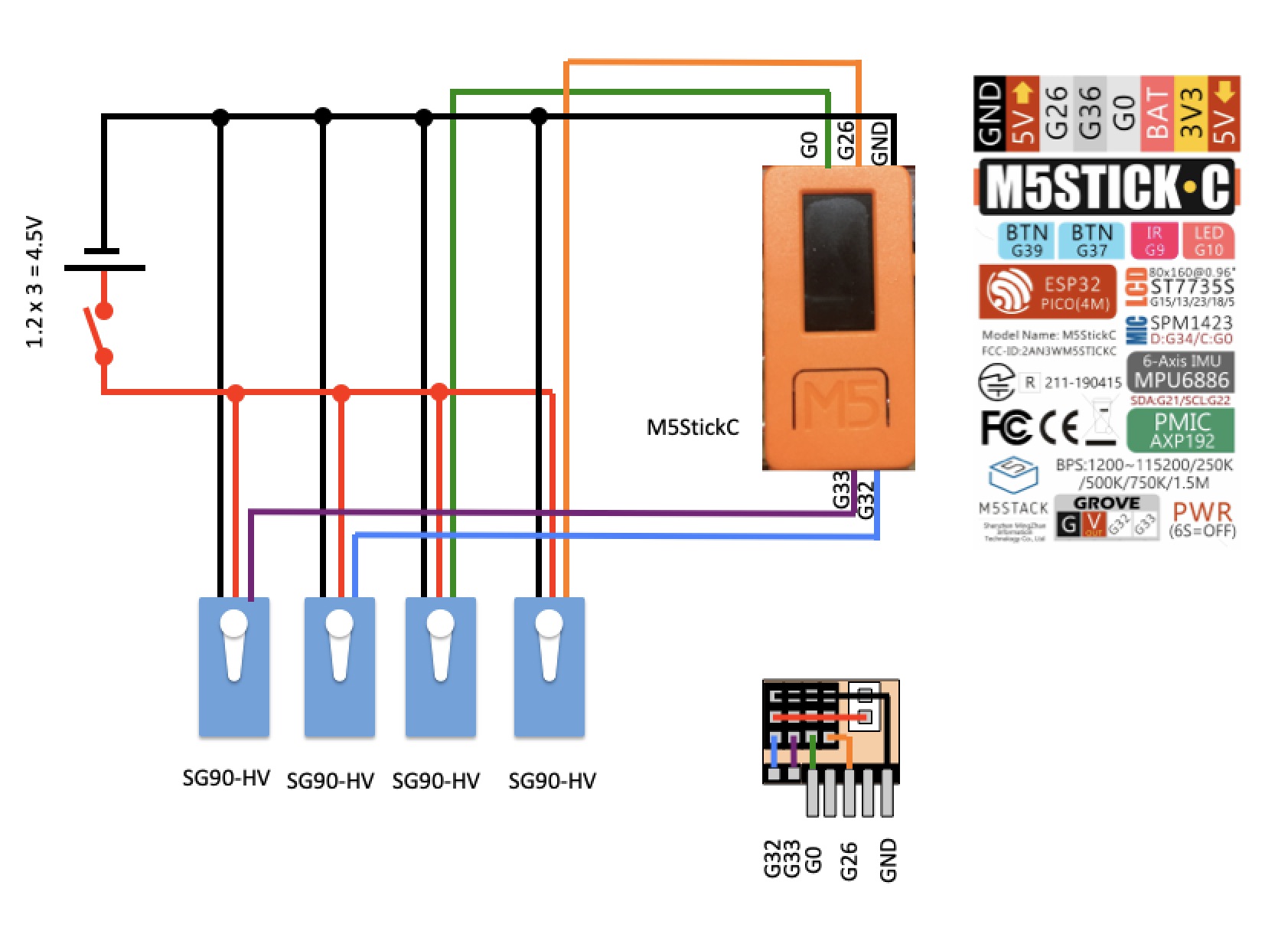
サーボへの配線はHATを作って結線しています。
5.メカナムホイールの設計
メカナムホイールはホイールの外周に45度傾けたローラーを配置しています。2種類のものを2組使用しています。
ローラは横から見ると円形になるようにしています。



3Dプリントした部品はこのようになっています

ローラーは滑り止めのためにシリコンチューブをかぶせています

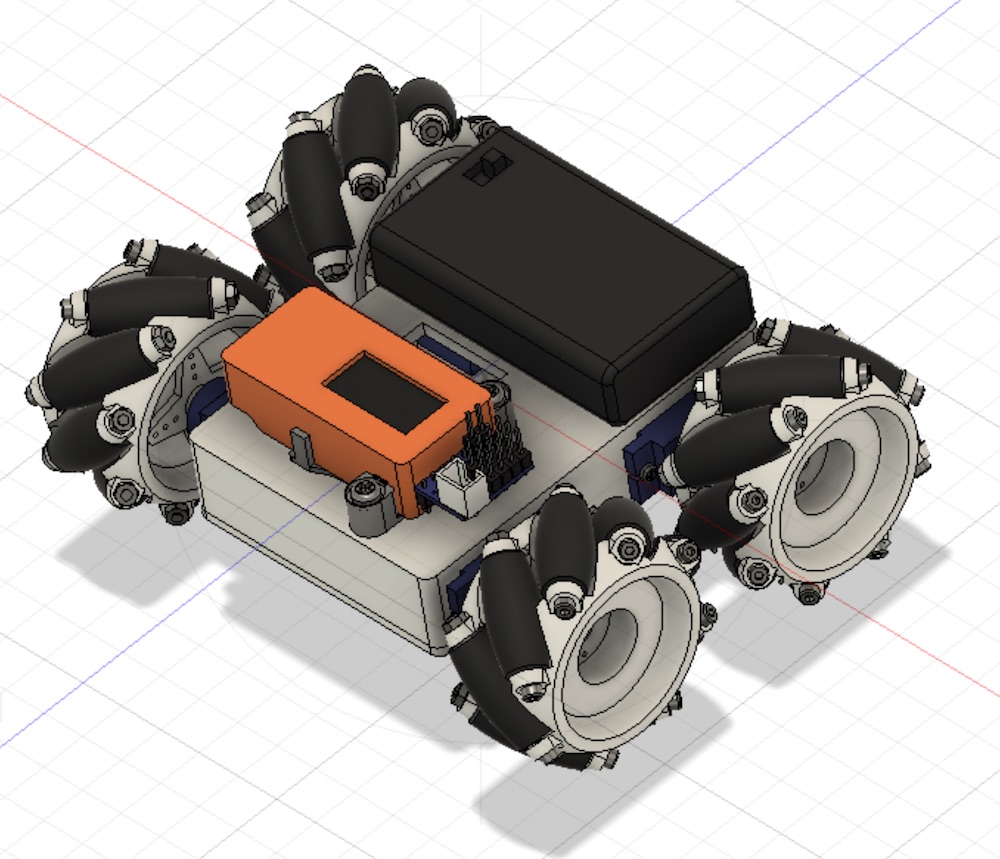
ローバーの外観はこのようになっています
6.メカナムホイール制御
各ホイールを図のように独立に回転させるようにすると前後左右回転など自由に動かすことが出来ます。

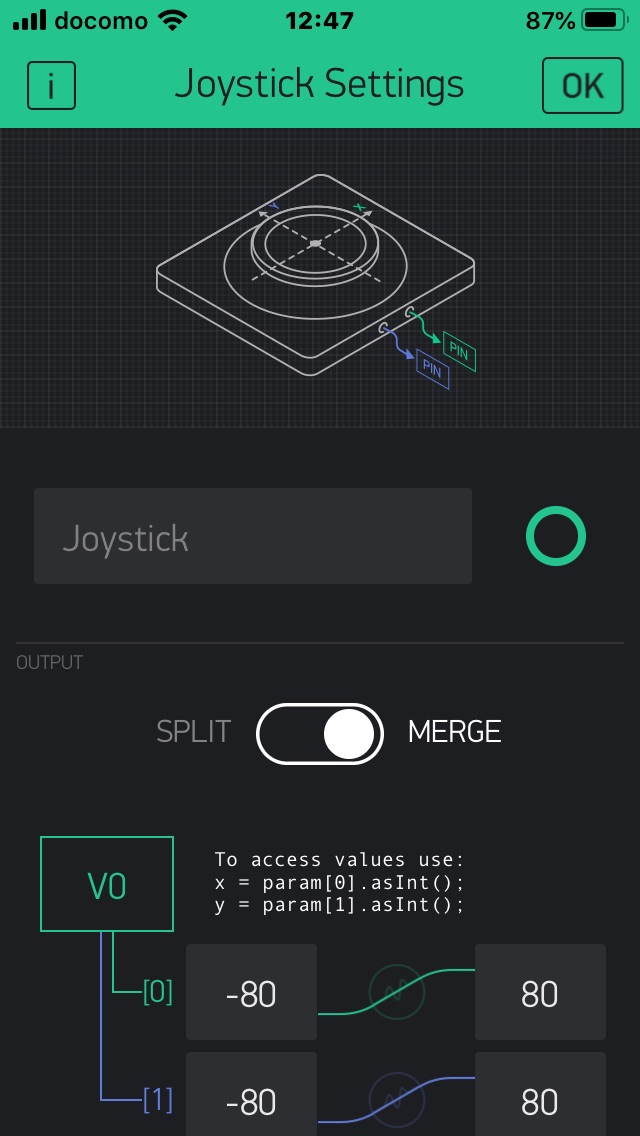
7.Blynkでコントロール
今回コントロールはBlynkというiPhoneアプリを使用しています。
Blynkについてはブログに書いたので参考してください。
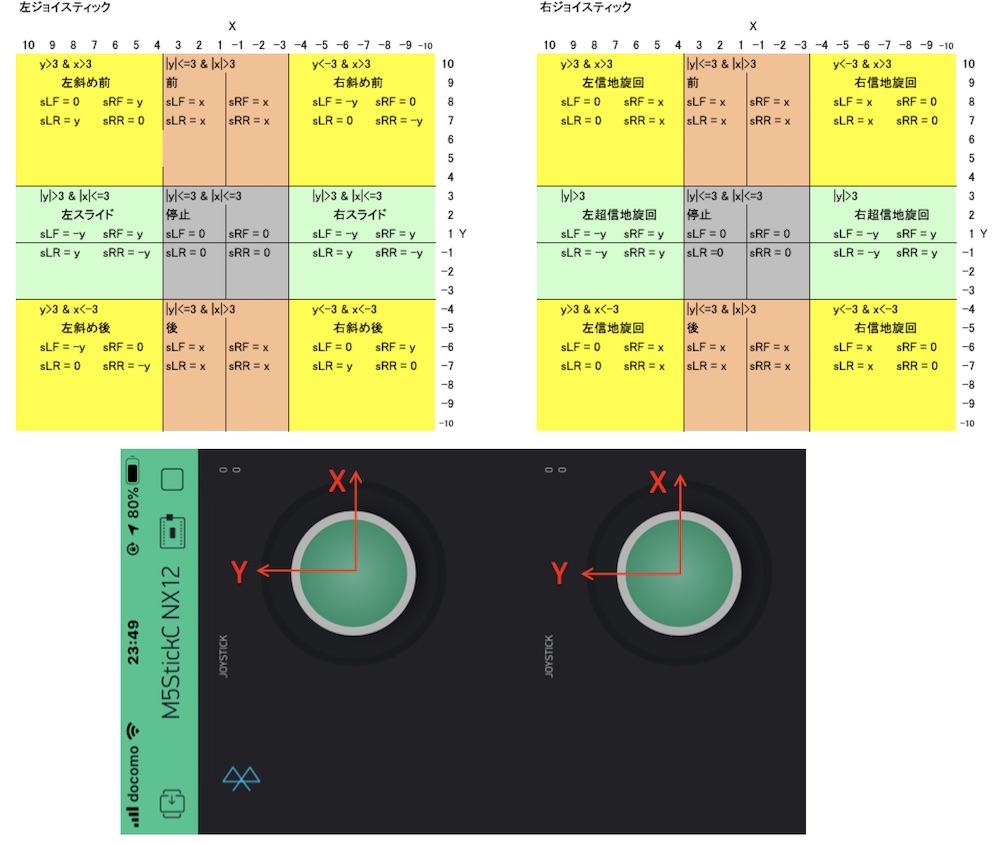
Blynkでは2つのジョイスティックを使用しています。
8.スケッチ
詳細のスケッチはブログを参照してください。
9.動作確認
Blynkの操作に合わせて前後、左右、回転が出来ます
更新履歴
- 2020.6.7NX12 M5StickCで作るメカナムホイール・ローバーの製作のページを作成。NEW