Making of NX15
Won 2nd place in M5Stack Creativity Contest 2021
NX15 won second place in the M5Stack Creativity Contest held in 2021.

Click here for the official website of the contest
Agenda
1. Overview
2. Components
3. About M5Atom
4. Designed by Fusion360
5. Assembly
6. Control App for macOS
7. Motion Generation
8. Simulation by ROS+gazebo
9. Introduction Movie
1. Overview
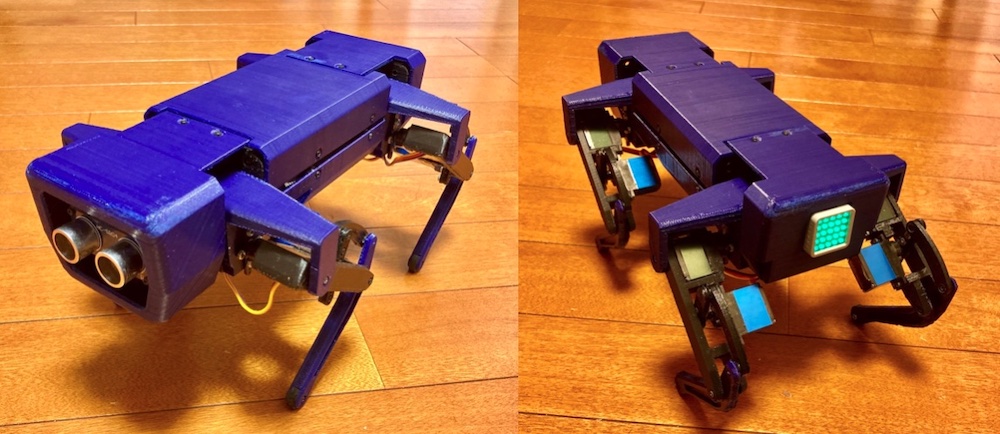
I made a 4-legged robot with M5Atom Matrix, which is the smallest in the M5Stack series.
Basic Concept
I would like to build a Quadruped Dog Robot like Spot Micro.
I would like to build a robot as easily and inexpensively as possible.
I would like to make anything myself as much as possible.
Function:
Smooth Walking
Head Rolling
Camera Streaming
Control with Wii Nunchuck
Obstacle avoidance by ultrasonic
Horizontal control by IMU
ROS

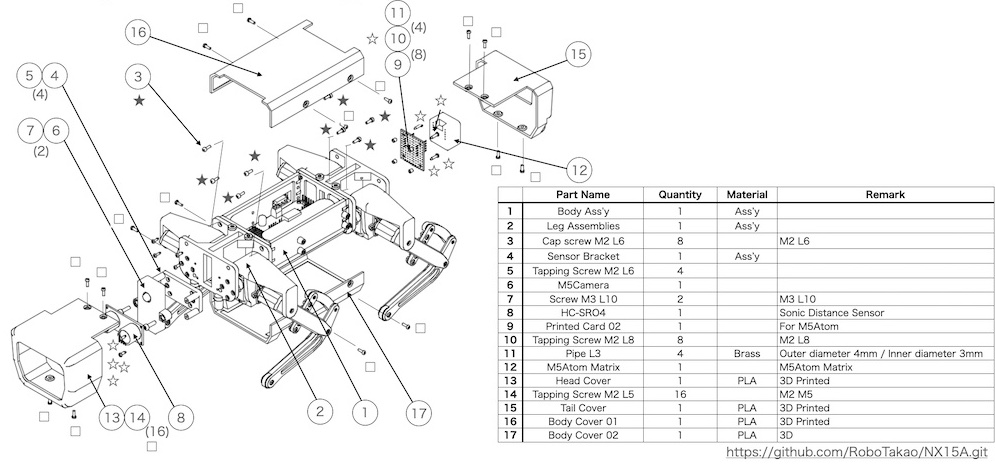
2. Components
Robot
1)M5Atom Matrix
2)PCA9685 servo driver
3)Servo TowerPro MG90D x8 TowerPro MG92B x4
4)M5camra
5)Ultrasonic Distance Sensor HC-SR04
6)Battery 6V NiMH battery
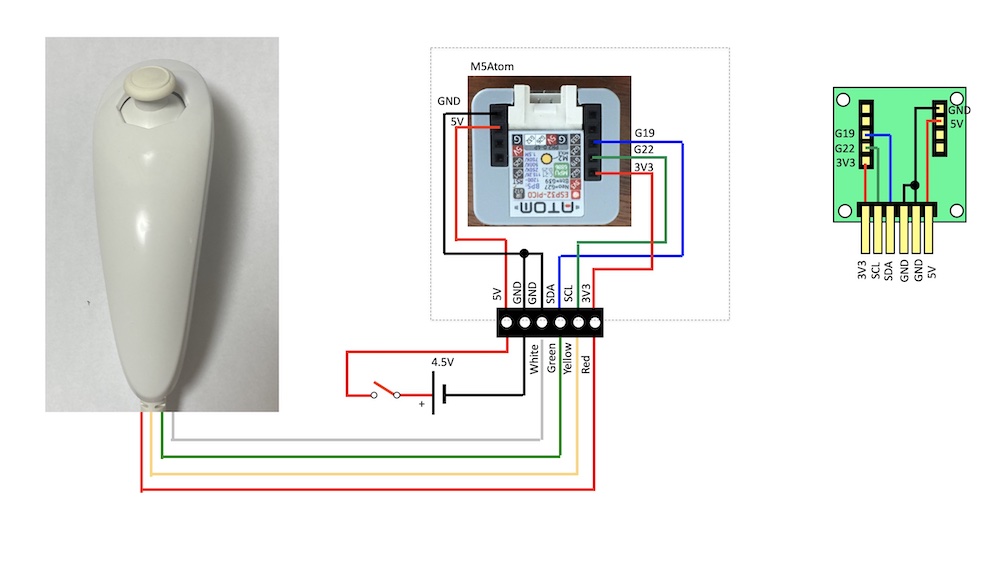
Controlor
1)Wii Nunchuck
2)M5Atom lite
3)Battery 1.5Vx3
The wiring is as follows.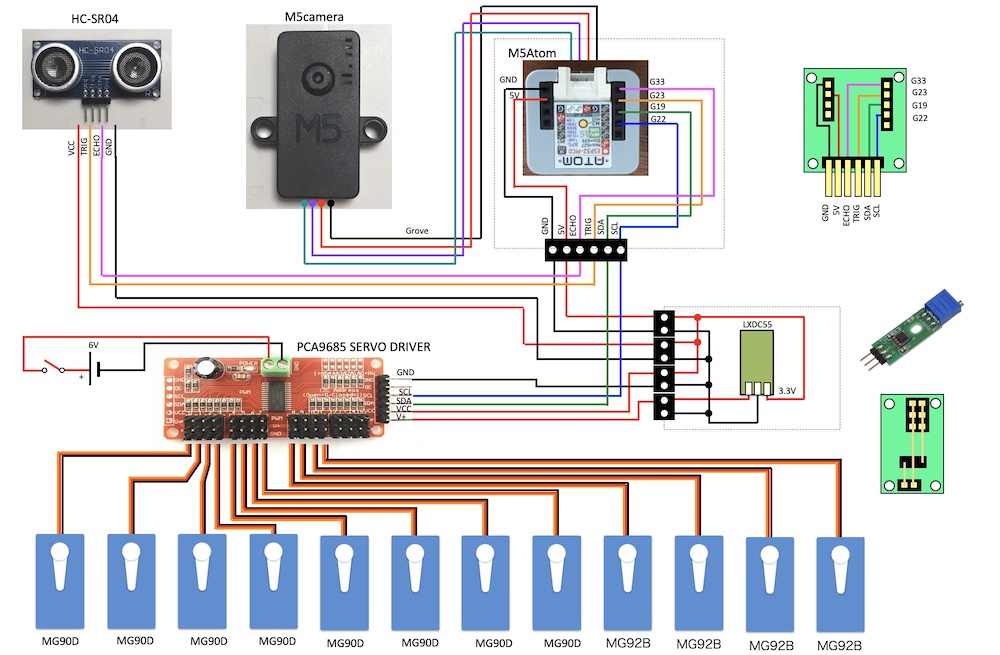
The system configuration is as follows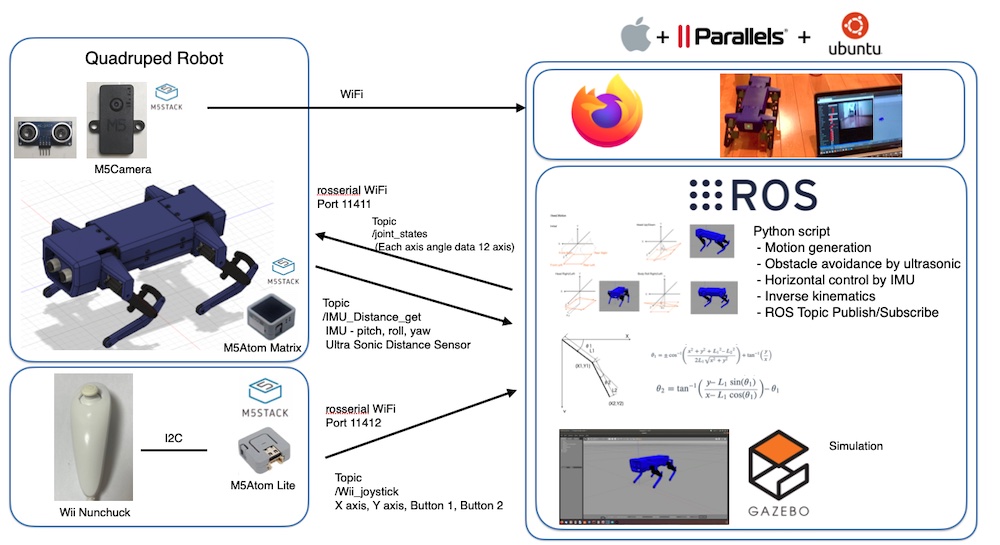
3. About M5Atom
I wrote about M5Atom on my blog, so please see here.
4.Designed by Fusion360
I used Fusion 360 for structural design.

5.Assembly
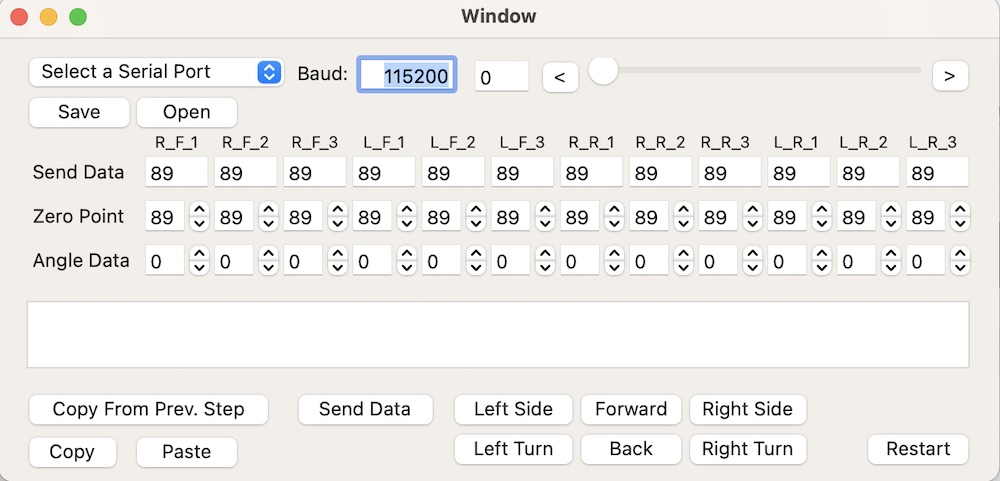
6.Control App for macOS
This time I created the motion using my own macOS application.
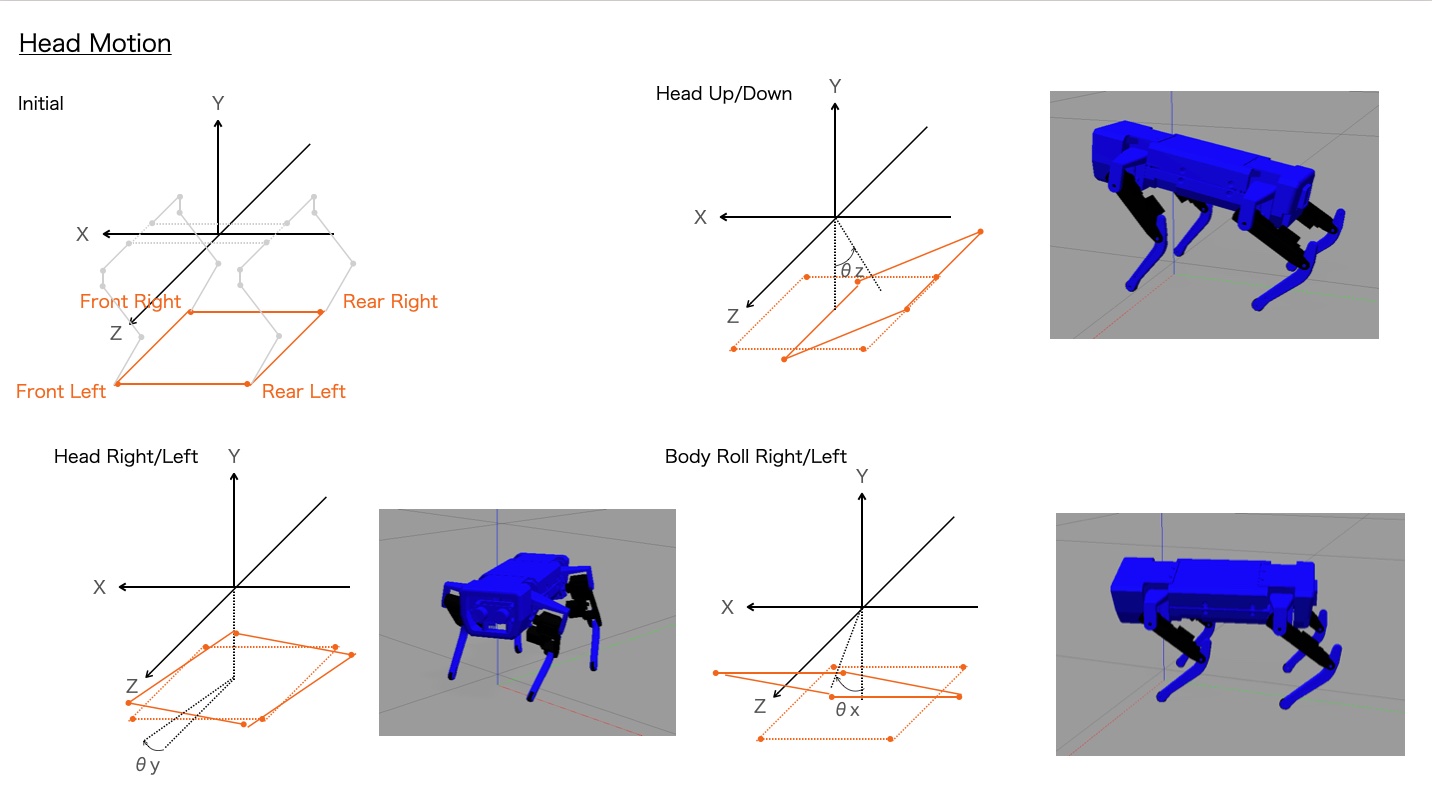
7. Motion Generation
Walking MotionCarry the legs by the specified amount of movement with the diagonal legs set.

Head moving motion
Make a quadruped set and rotate the perpendicular line from the center of the body to the ground plane by the specified angle.
8.Simulation by ROS+gazebo
This time, I am working on a simulation using ROS.
See other books and sites for a description of ROS.
I can now simulate motion on gazebo. It can also be operated with the keyboard.
I put the source of ROS+gazebo on github, so I would appreciate it if you could refer to it.
https://github.com/RoboTakao/NX15A.git
9.Introduction Movie