NX15の製作
M5Stack Creativity Contest 2021で2位を受賞
2021年に開催された、M5Stack Creativity Contest 2021で2位を獲得しました。

コンテストの公式サイトはこちら
アジェンダ
1. 概要
2. 構成
3. M5Atomについて
4. Fusion360での設計
5. 組み立て
6. macOS用コントロールアプリ
7. モーション作成
8. ROS+gazeboによるシミュレーションル
9. 紹介動画
1. 概要
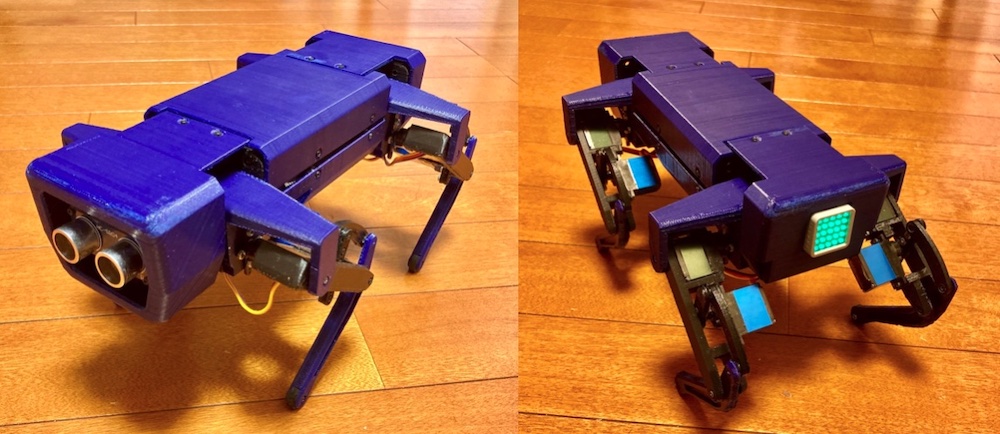
M5Stackシリーズで最小のM5AtomシリーズのM5Atom Matrixで4脚ロボットを作りました。
コンセプトとしては
Spot Microの用の犬型四脚ロボットを作りたい。
なるべく簡単に安く作りたい。
極力自分で作りたい。
機能:
スムーズな歩行
頭をローリング
頭のカメラでストリーミング
Wiiヌンチャクでコントロール
超音波距離センサーで障害物回避
IMUによる水平制御
ROSの利用

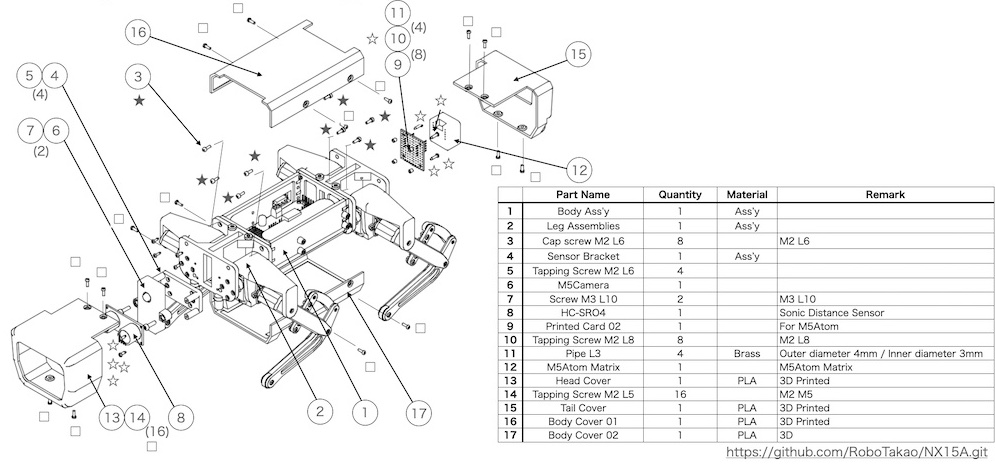
2. 構成
ロボット
1)M5Atom matrix
2)PCA9685 サーボドライバ
3)サーボ TowerPro MG90D x8 TowerPro MG92B x4
4)M5camra
5)超音波距離センサ HC-SR04
6)電池 6Vニッケル水素電池
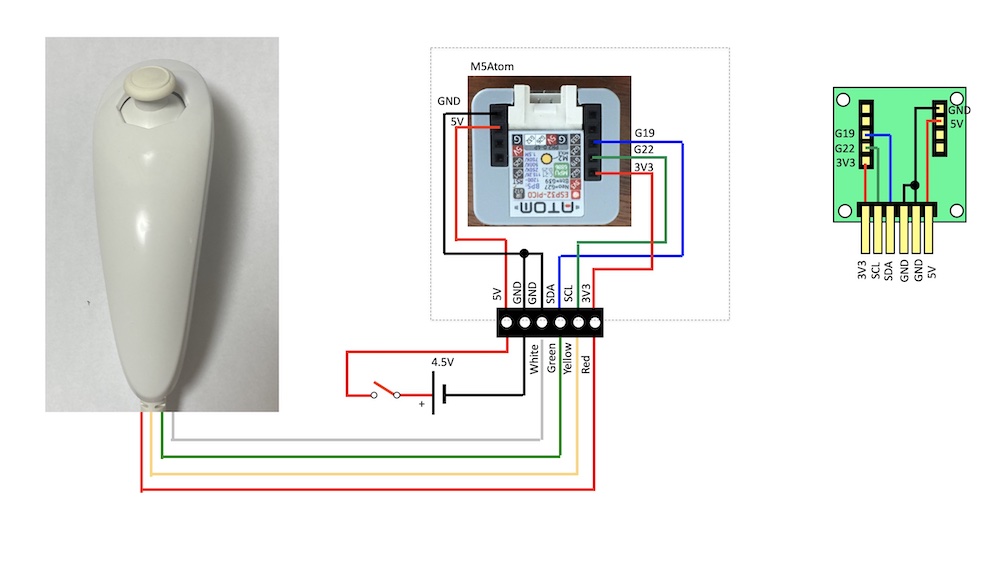
コントローラ
1)Wiiヌンチャク
2)M5Atom lite
3)電池1.5Vx3
結線は以下のようにしています。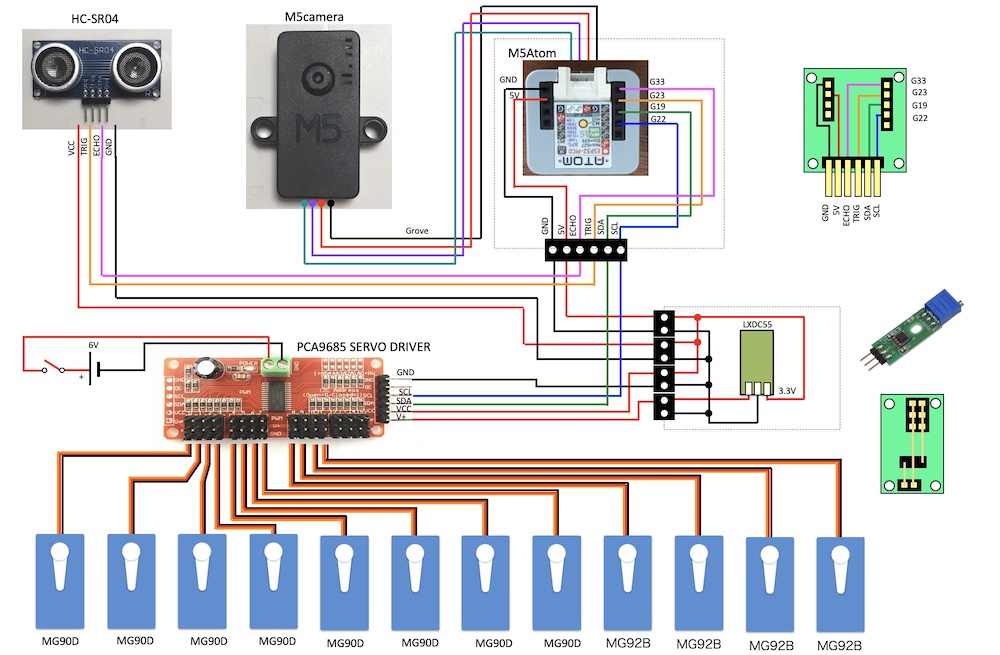
システム構成は下記のようになっています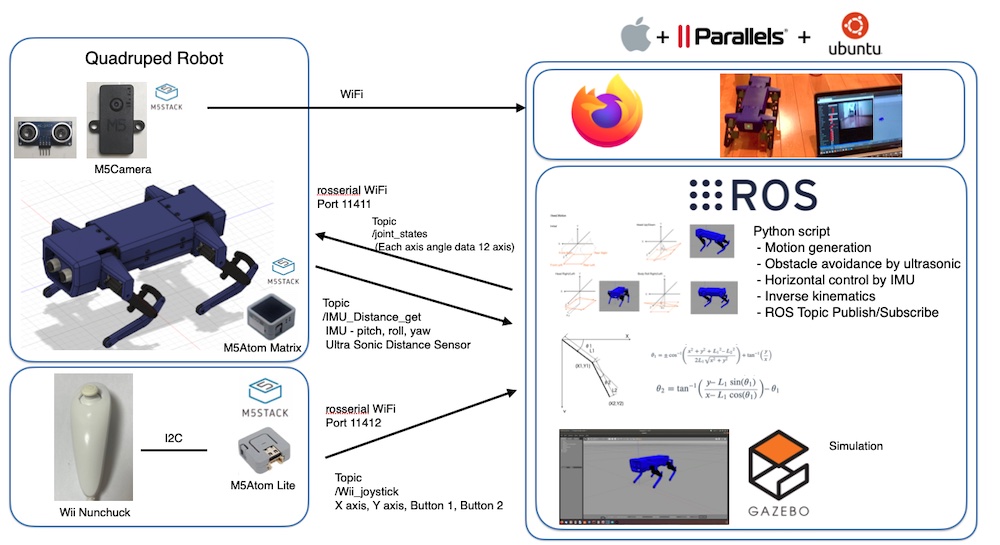
3. M5Atomについて
M5Atomについてはブログの方で書きましたので、こちらを参照してください。
4. Fusion360での設計
構造の設計はFusion360を使用しました。

5. 組み立
6. macOS用コントロールアプリ
今回モーションの作成は自作のmacOSアプリで行いました。
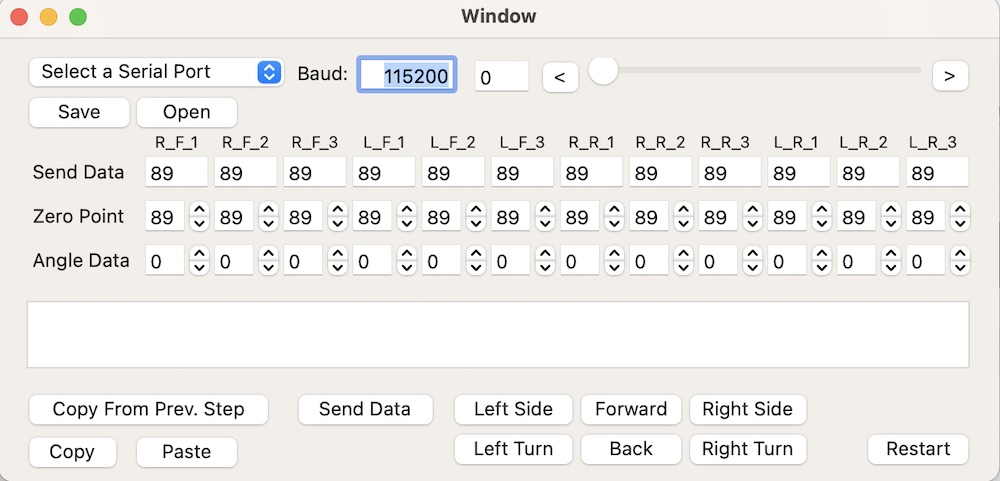
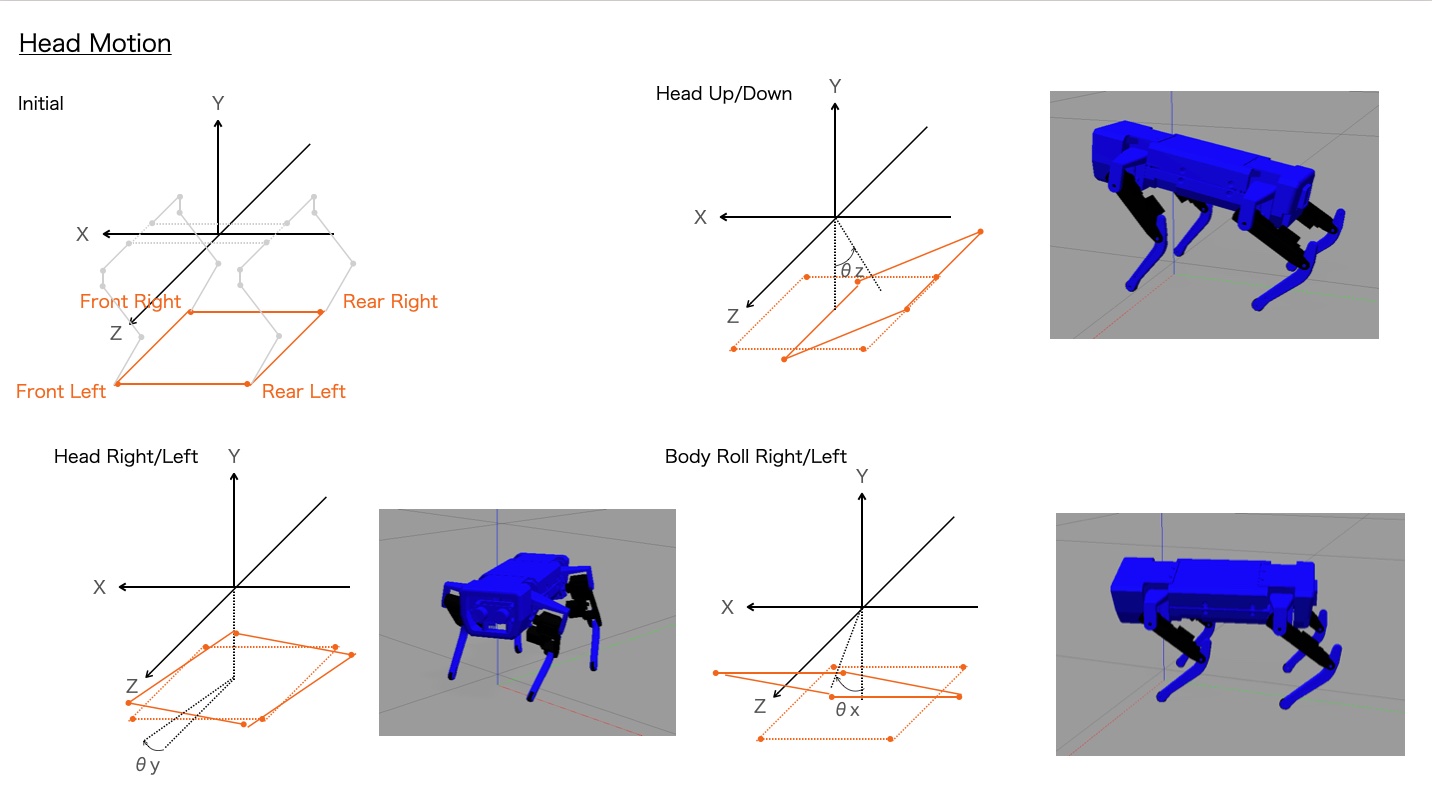
7. モーションの作成
歩行モーション対角線上の脚をセットにして指定した移動量だけ脚を運ぶ

頭を振るモーション
四脚セットにしてボディーの中心から接地面への垂線を指定角度分だけ回転させる
8. ROS+gazeboによるシミュレーション
今回は初めてROSを使ってシミュレーションに取り組んでいます。
ROSの説明は他の書籍やサイトを参照してください。
gazebo上でモーションをシミュレーションできるようになりました。またキーボードで操作可能です。
ROS+gazeboのソースはgithubに置きましたので、参考にしていただければ幸いです。
https://github.com/RoboTakao/NX15A.git
9. 紹介動画
更新履歴
- 2021.10.10M5Stack Creativiry Contest 2021 2位受賞NEW
- 2021.8.24アップデート
- 2021.8.15動画を更新
- 2021.5.29動画を追加
- 2021.5.16実機のコントロールを追加
- 2021.5.5ROS+gazeboの情報を追加
- 2021.4.18NX15 M5Atomで作る4脚ロボットの製作のページを作成。