Making of NX19
Agenda
1. Overview
2. Components
3. About M5Stamp C3
4. Designed by Fusion360
5. PCB Designed by KiCAD
6. Assembly
7. Control App for macOS
8. Control by Dabble
9. Control by Dabble
10. Motion check
1. Overview
I made a hexapod robot with M5Stamp C3 using ESP32 C3 in M5Stack series, round LCD and AI camera UnitV and IMU MPU6050.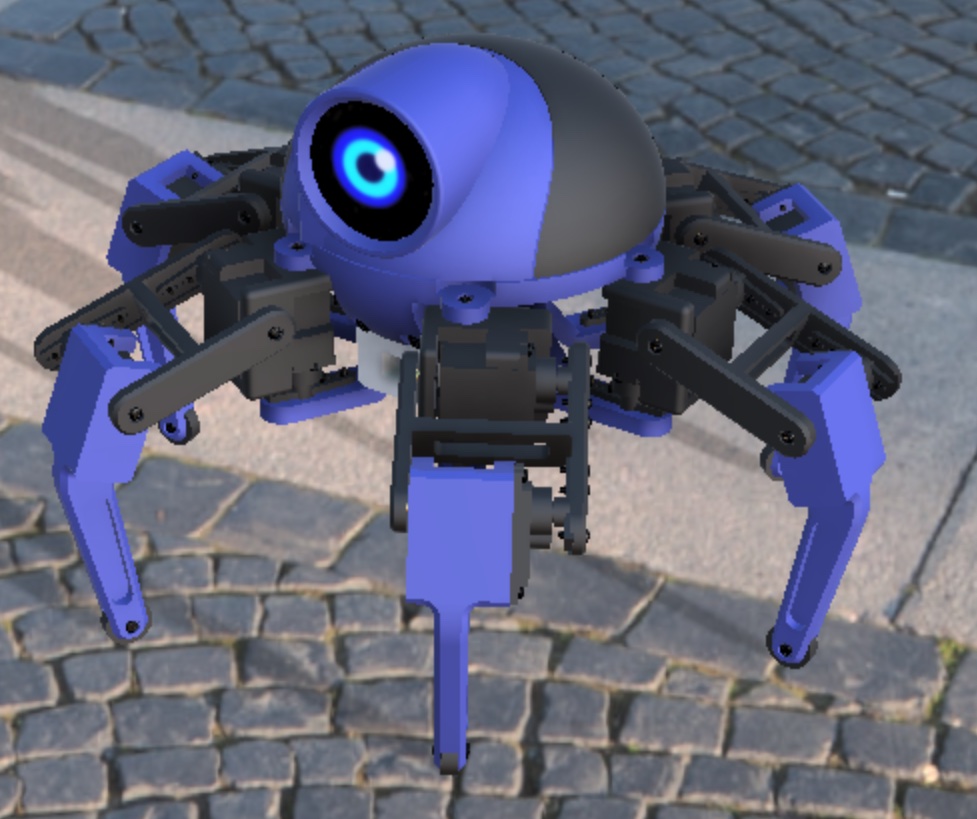

2. Components
1)M5Stamp C3
2)Servo TowerPro MG90D x18
3)Battery Lithium Ion 16340(With protection circuit)x2
4)PCA9685 Servo driver PCB(PONDA's PCB)
5)DCDC board LXDC55
6)AI camera UnitV
7)IMU MPU6050
8)ROund LCD Switch Science site
The wiring is as follows.
3. About M5Stamp C3
About M5Stamp C3, Please refer Switch Science site
4.Designed by Fusion360
I used Fusion360 for structural design.

Also, I put the STL for 3D printed parts on GitHub, so please refer to it.
STL for 3D printed parts Github
5.PCB Designed by KiCAD
I used KiCAD for PCB design. I ordered from PCBWay.
I wrote about board ordering with PCBWay on my blog.

Also, I put the PCB data on GitHub, so please refer to it.
PCB Data Github

I used PONDA's board for PCA9685.(PONDA's Board)

6.Assembly
The contents were pushed in like this.

7.Control App for macOS
This time I created the motion using my own macOS application. However, M5Stamp C3 cannot use classic Bluetooth, so I made it temporarily for M5Atom.


8.Control by Dabble
This time, the control uses the iPhone application called Dabble.
I wrote about Dabble onmy blog, so please refer to it.

9.Sketch
I wrote a detailed M5Stamp C3 sketch and UnitV Python code on Github, so please refer to that.
Walking motion sketch Github
10.Motion check
The movement of the leg this time is calculated by inverse kinematics. At first, I used spreadsheet software outside the robot for calculations, but finally implemented it in M5Stamp C3 so that it could be calculated in real time.
You can freely swing your head by operating with Dabble.
It can move forward/backward, left/right, diagonal, left/right turn continuously
It detects and tracks human faces with AI camera UnitV.
It uses an IMU to keep it level
Control with JoyC
Update
- 2023.2.12Created a page of a hexapod robot with M5Stamp C3 + Round LCD + UnitVNEW