NX19の製作
アジェンダ
1. 概要
2. 構成
3. M5Stamp C3について
4. Fusion360での設計
5. KiCADでの基板設計
6. 組み立て
7. macOS用コントロールアプリ
8. Dabbleでコントロール
9. スケッチ
10. 動作確認
1. 概要
M5StackシリーズでESP32 C3を使ったM5Stamp C3とラウンド液晶とAIカメラのUnitVそしてIMUのMPU6050を使ってで六脚ロボットを作りました。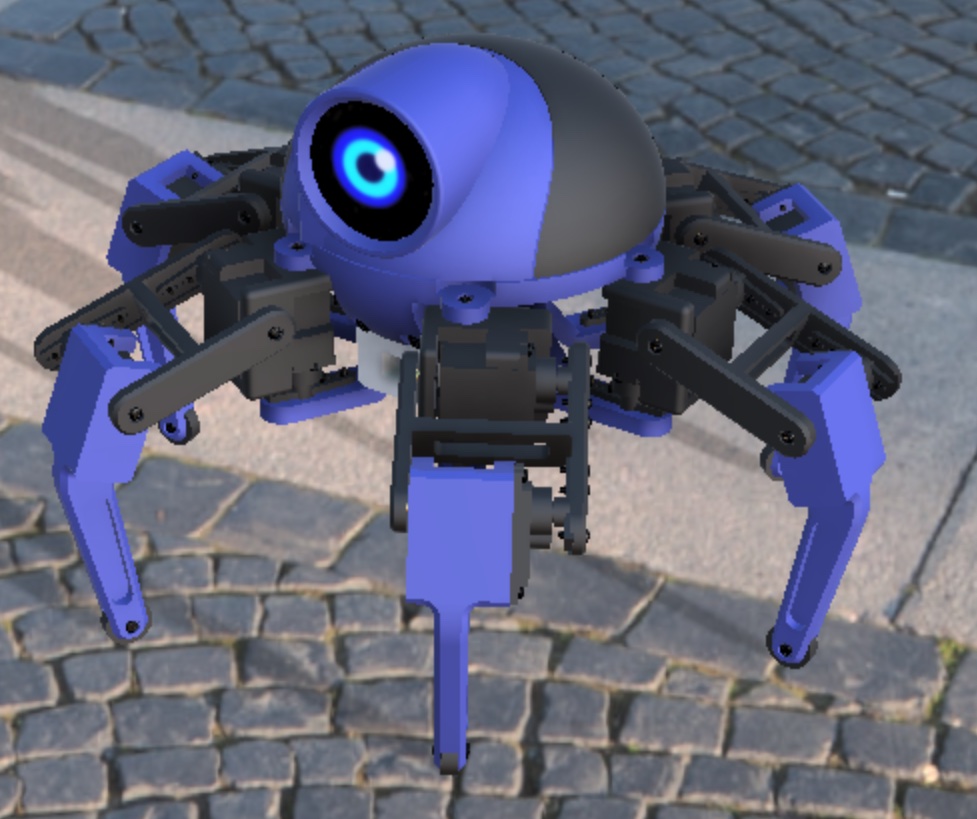

2. 構成
1)M5Stamp C3
2)サーボ TowerPro MG90D x18
3)電池 リチウムイオン16340(保護回路付き)x2
4)PCA9685サーボドライバ基板(PONDAさんの基板)
5)DCDC基板 LXDC55
6)AIカメラ UnitV
7)IMU MPU6050
8)ラウンド液晶 スイッチサイエンスのサイト
結線は以下のようにしています。
3. M5Stamp C3について
M5Stamp C3については、スイッチサイエンスのサイトを参照してください。
4.Fusion360での設計
構造の設計はFusion360を使用しました。

また、3Dプリント部品のためのSTLをGitHubに置きましたので参考にしてください
3Dプリント部品用STL Github
5.KiCADでの基板設計
基板はKiCADを使って設計し、PCBWayでオーダしました。
PCBWayによる基板オーダーについてはブログの方で書きましたので、こちらを参照してください。

また、基板データをGitHubに置きましたので参考にしてください
基板ガーバーデータ Github

PCA9685はPONDAさんの基板を使用しています。(PONDAさんの基板)

6.組み立
中身はこのように頑張って押し込めました。

7.macOS用コントロールアプリ
今回モーションの作成は自作のmacOSアプリで行いました。ただしM5Stamp C3はクラシックBluetoothが使えないのでM5Atomを仮に作りました。


8.Dabbleでコントロール
今回コントロールはDabbleというiPhoneアプリを使用しています。
Dabbleについてはブログに書いたので参考してください。

9.スケッチ
詳細のM5StampC3のスケッチとUnitVのPythonコードはGithubに書きましたのでそちらを参照してください。
歩行モーションスケッチ Github
10.動作確認
今回の脚の動作は逆運動学により計算しています。最初はロボットの外側で表計算ソフトを使って計算していましたが最終的にはM5Stamp C3に実装することでリアルタイムに計算できるようにしました。
Dabbleで操作操作して自由に首振りが出来ます
前後、左右、斜め、左右ターンを連続で動作できます
AIカメラのUnitVで人の顔を検出して追跡します
IMUを使って水平を維持
JoyCを使ってコントロール
更新履歴
- 2023.2.12NX19 M5Stamp C3+ラウンド液晶+UnitVで作る六脚ロボットのページを作成NEW