2023.5.22
NX20の製作
アジェンダ
1. 概要
2. 構成
3. Fusion360 スパーギア
4. JoyCでコントロール
5. スケッチ
6. 動作確認
1. 概要
M5StackシリーズのM5Stamp Picoを使ってメカナムホイール+マニピュレータを作りました。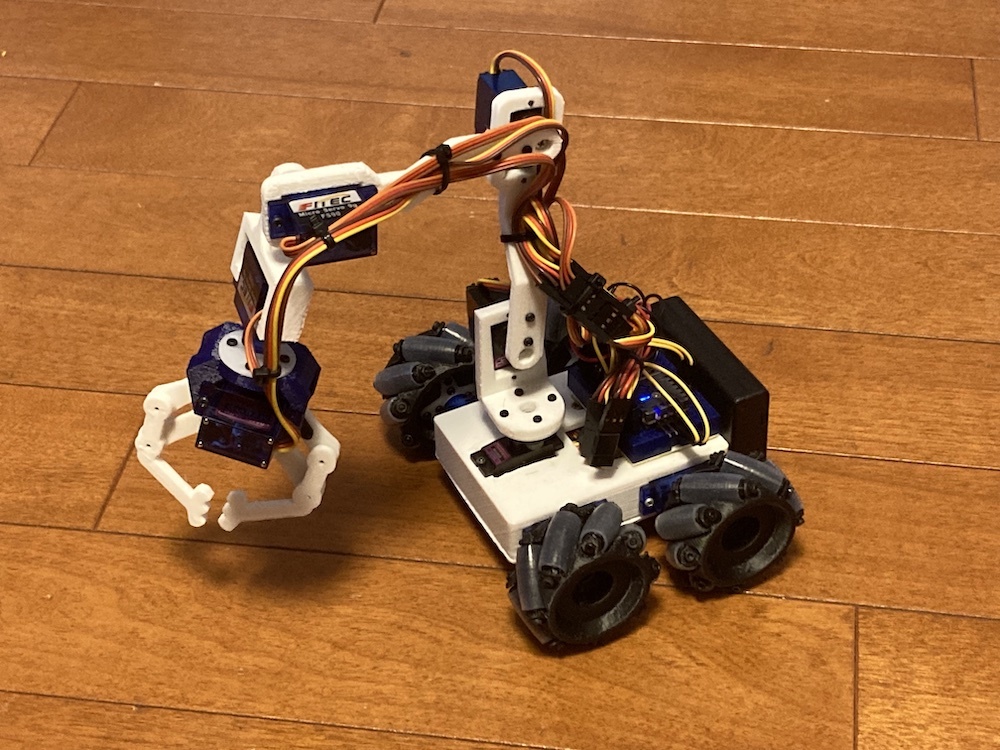
2. 構成
1)M5Stamp Pico
2)サーボ FEETECH FS90R x4
3)サーボ FEETECH FS90 x2
4)サーボ TowerPro MG90D x2
5)サーボ TowerPro MG92B x1
6)サーボ TowerPro SG92R x1
7)電池 単四ニッケル水素電池x4
8)メカナムホイール(自作)
結線は以下のようにしています。
3. Fusion360 スパーギア
ハンドのギア部分については、Fusion360の標準スクリプトであるSpurGearを使用しました。


4.JoyCでコントロール
今回コントロールはM5StickCを使用するJoyCを使用しています。

5.スケッチ
詳細のスケッチはGithubに書きましたのでそちらを参照してください。
スケッチ Github
6.動作確認
JoyCでのコントロールでマニピュレータとメカナムホイールを動かせました。
更新履歴
- 2023.5.22NX20 M5Stamp Picoで作るメカナムホイール+マニピュレータのページを作成NEW