2023.7.9
NX22の製作
アジェンダ
1. 概要
2. 構成
3. 組み立て
4. モーション
5. スケッチ
6. 動作確認
1. 概要
M5StackシリーズのM5Stamp Picoを使って四軸で四脚ロボットを作りました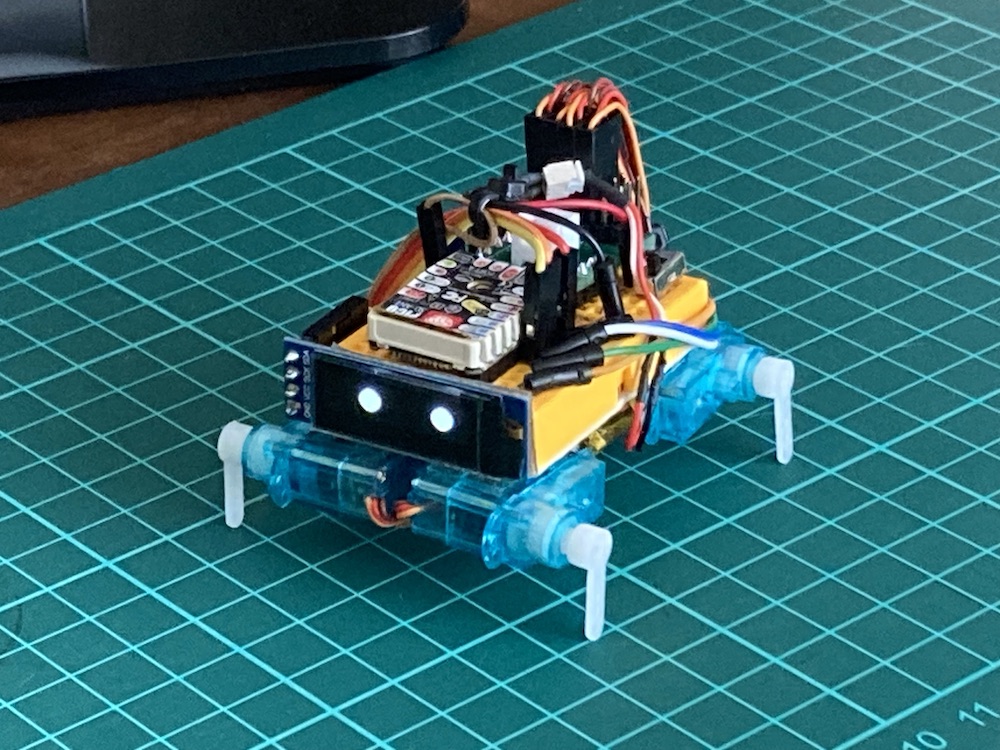
2. 構成
1)M5Atom S3
2)サーボ FEETECH FS0403 x4
3)電池 リチウムイオンポリマー
4)OLED SSD1306
結線は以下のようにしています。
3. 組み立て
組み立ては以下のように行います。両面テープなどで接着します。

4.モーション
四軸で進むためには工夫が必要です。
前進(後進はこの逆の動作です)

右ターン(左ターンはこの逆の動作です)

5.スケッチ
詳細のスケッチはGithubに書きましたのでそちらを参照してください。
スケッチ Github
6.動作確認
今回は前進、後進、左右ターンに加えて前足を上げる動作を入れました。
またOLEDディスプレイで顔の表情を変えます。目をパチパチします
更新履歴
- 2023.7.9NX22 M5Stamp Picoで作る四軸四脚ロボットのページを作成NEW