NX09の製作
手順
1. 概要
2. 構想
3. システム設計
Arduinoについて
サーボについて
電池について
4. 構造設計
3D CADについてNEW
5. 3Dプリンティング
6. サーボシールドの製作Now Preparing
7. ハーネスの製作Now Preparing
8. 組立Now Preparing
9. Arduino用プログラミングNow constructing
10. モーション作成Now Preparing
1. 概要
ここでは簡単な4つのサーボ(モーター)を使った二足歩行ロボットを作りたいと思います。
とりあえず出来上がりはこんなロボットで、こんな風に歩きます。
主な構成要素
・Micro2BB サーボ 4個
・Arduino UNO コントロールボード
・サーボシールド サンハヤトのユニバーサル基板を使って
・単三ニッケル水素電池 4個
・9V乾電池
・3Dプリントしたサーボブラケットとケース
今は何のことか分からない構成部品もあるかもしれませんが順を追って説明していきます。
2. 構想
まずはどんなロボットを作るか。いきなり半田ごてを使って回路作ったりいきなり3Dプリントなんてできませんので、Webで他の人が作ったロボットなどを眺めながらまずは紙の上に絵を描いてみましょう。だいたいで構いません。こういうのをポンチ絵と言います。出来上がりのロボットを想像しながら実は一番楽しい時間かもしれません。ポンチ絵をいっぱい描いて作らなかったロボットはたくさんいます。だいたいこんな感じです。

3. システム設計
システムの構成要素は次のようなものになっています。
・Arduino
・サーボ4個
・9Vバッテリー Arduino用電源
・ニッケル水素電池 単三1.2V4個 サーボ用電源

Arduinoについて
後述するサーボと呼ばれるモーターはコンピュータを積んだコントロールボードでコントロールします。コントロールボードには色々なものが使用できますが今回はArduinoというイタリアで開発されたプロトタイピングに適した基板を使用することにします。Arduinoにもたくさんの種類があり何使ったらいいか迷うところですが、最も一般的なArduino UNOを使用することにします。Arduino UNOは4000円くらいで入手可能ですし、国内外にたくさんのドキュメントがありますので情報がたくさんあります。一般的なマイコンはマシン語やC言語などのコンピュータ言語を駆使してマイコンのハードウェアのデータシートとにらめっこしながらプログラミングしないと行けませんがArduinoの場合はC言語をベースにした比較的簡単な専用の言語を使用します。今回使用するサーボを動かすときもライブラリーが存在するので簡単な記述で動かすことができます。具体的なプログラミングについては後述します。


サーボについて
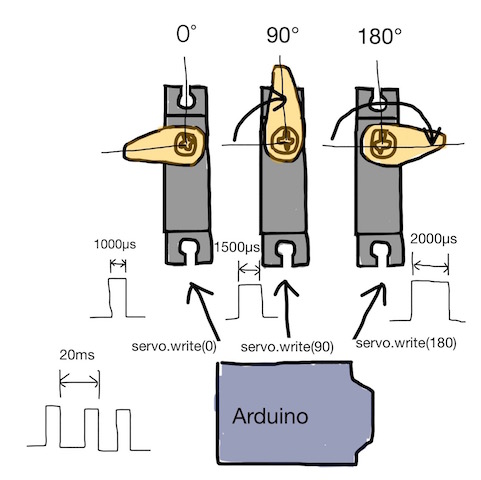
一般的なDCモータはある電圧をかけるとある回転スピードで回り続けるように動作します。サーボというモーターはマイコンからの角度指令に対して一定の角度を保つように動作します。したがってロボットのような関節をある角度で保持するように動くものには適したモータと言えます。角度の指令はArduinoからは0〜180°の角度でしていします。サーボはそのままその角度まで回転してその位置で角度を保持します。
Arduinoではサーボの0〜180°の角度を指定します。実際には角度に応じた時間幅のパルス状の電圧をサーボに送信しています。
具体的なサーボを動かすプログラミングは後述します。
今回使用するサーボ GWS Micro2BBMG
 トルク 5.4kg-cm@4.8V
トルク 5.4kg-cm@4.8V
6.4kg-cm@6.0V
スピード 0.17sec/60°@4.8V
0.14sec/60°@6.0V
重量 26.6g
寸法 27.9mmx14.0mmx29.7mm
電池について
Arduinoは9V電池で動かします。ただ、サーボを動かすには結構電流が必要なので別に電池を使います。この電池は一般的なマンガン電池やアルカリ電池では電流容量が足りないのでニッケル水素電池などを使用します。


4. 構造設計
サーボを固定したり、ロボットの骨組みを作ったりコントロールボードを取り付けるフレーム類の構造物はアルミ板を切って曲げたものを使用したり3Dプリントした部品を使いします。以前は私はアルミ板を使用していましたがこれを使うのは結構大変なので今回は3Dプリントした構造物で製作することにします。アルミ板での構造物の作り方はまた別の機会に説明したいと思います。
そして3Dプリントした部品は3DCADを使って設計したいと思います。今回は3DCADはFusion360というソフトを使用します。
3D CADについて
最近では無料で使用出来る3DCADがだいぶ増えました。業務で使用する場合にはCreo ParametricやAutodesk Inventorなど何100万円もする3DCADが主流ですが、我々はそのような高額ソフトは使用できないので無料のCADを使用します。バランスの取れている3DCADとしてはAutodesk Fusion360がオススメです。これは教育機関や学生は無料で使用出来ることに加えて、100,000ドル以下のビジネス用途では無料で使用できます。学生でもないアマチュアのロボビルダーにはもってこいです。
インストールも簡単です。Googleで”Autodesk Fusion360"を検索すればすぐに体験版のダウンロードサイトを見つけることができるはずです。メールアドレスなどの登録をしてアカウント作成が必要ですが、Fusion360はクラウドを使ってデータを保存していくので後々にもこのアカウントは使用することになります。

とりあえずサーボをモデリングしてみます。まずは現物のサーボを寸法測定して、その寸法でモデリングします。3DCADの基本的なモデリングは、まず面に形状をスケッチしてその形状を押し出して立体にします。穴を開ける場合もほぼ同じです。穴を開けたい面にスケッチを描き、その形状で穴を開けます。その繰り返しをして、最後に角の面を取ったり、丸くすれば出来上がります。手順を動画にしたので参考にしてください。
更新履歴
- 2017.6.183DCADの情報を追加しました。NEW
- 2017.6.10NX09のページを更新しました。
- 2017.6.4NX09のページを作りました。