NX10の製作
手順
1. 概要
2. 構想
3. システム設計
M5Stackについて
サーボについて
サーボ基板について
電池について
4. 構造設計
3D CADについて
3Dプリンティング
5. 組み立て
6. Mac側コントロールアプリ
7. 動作
1. 概要
今回はM5Stackと18個のサーボ(モーター)を使った二足歩行ロボットを作りたいと思います。

主な構成要素
・Micro2BB サーボ 18個
・M5Stack Gray
・サーボ基板
・ニッケル水素電池 6V
・3.7Vバッテリーモジュール
・3Dプリントしたサーボブラケット
今は何のことか分からない構成部品もあるかもしれませんが順を追って説明していきます。
2. 構想
まずはどんなロボットを作るか。いきなり半田ごてを使って回路作ったりいきなり3Dプリントなんてできませんので、Webで他の人が作ったロボットなどを眺めながらまずは紙の上に絵を描いてみましょう。だいたいで構いません。こういうのをポンチ絵と言います。出来上がりのロボットを想像しながら実は一番楽しい時間かもしれません。ポンチ絵をいっぱい描いて作らなかったロボットはたくさんいます。だいたいこんな感じです。
3. システム設計
システムの構成要素は次のようなものになっています。
・M5Stack
・サーボ18個
・ニッケル水素電池6Vバッテリー(俵形) サーボ用電源
・リチウムイオン電池 3.7V 制御用電源(予備)

M5Stackについて
M5StackはEPS32を搭載したモジュールで、WiFiやBluetooth内蔵で液晶画面も付いて、Grayというモデルは9軸加速度+ジャイロ+磁気センサー付きでロボットにはもってこいです。
しかもソフト開発はArduinoIDEも使えるなど、比較的簡単にArduinoから移行できます。



サーボについて
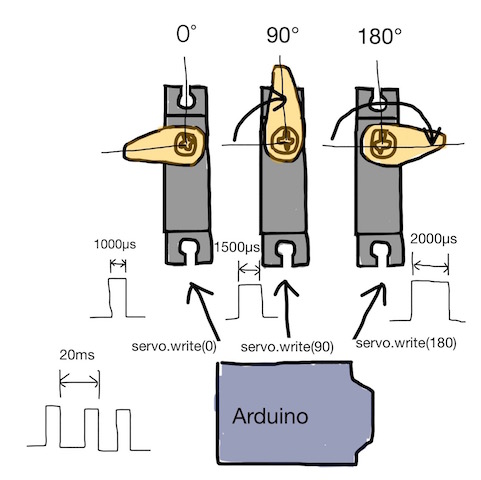
一般的なDCモータはある電圧をかけるとある回転スピードで回り続けるように動作します。サーボというモーターはマイコンからの角度指令に対して一定の角度を保つように動作します。したがってロボットのような関節をある角度で保持するように動くものには適したモータと言えます。角度の指令はArduinoからは0〜180°の角度でしていします。サーボはそのままその角度まで回転してその位置で角度を保持します。
ArduinoやM5Stackなどのマイコンはサーボの0〜180°の角度を指定します。実際には角度に応じた時間幅のパルス状の電圧をサーボに送信しています。
今回使用するサーボ GWS Micro2BBMG
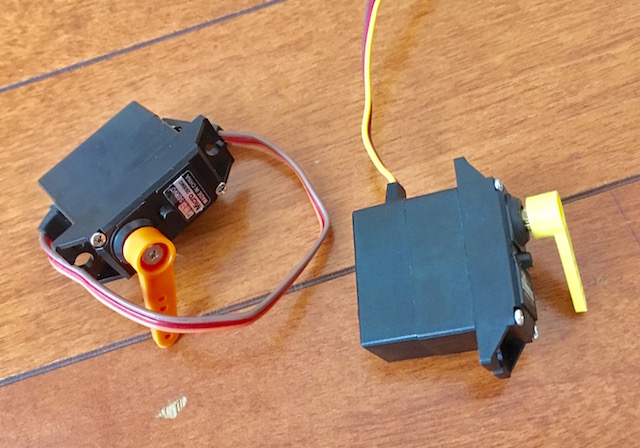 トルク 5.4kg-cm@4.8V
トルク 5.4kg-cm@4.8V
6.4kg-cm@6.0V
スピード 0.17sec/60°@4.8V
0.14sec/60°@6.0V
重量 26.6g
寸法 27.9mmx14.0mmx29.7mm
サーボ基板について
M5Stackとサーボを繋げるためにサーボ基板を作成しました。

サーボを18個同時に動かすために16個はPCA9685というI2C接続のサーボドライバで駆動させて残りの2個はM5Stackで直接駆動させます。
電池について
M5Stackは5Vで動作します。今回制御電源はサーボ用の電源からレギュレータを使って降圧して使いますが、サーボに負荷がかかると電圧が低下して正しく動作しないことがあるのでリチウムイオン電池を並列につなぎます。


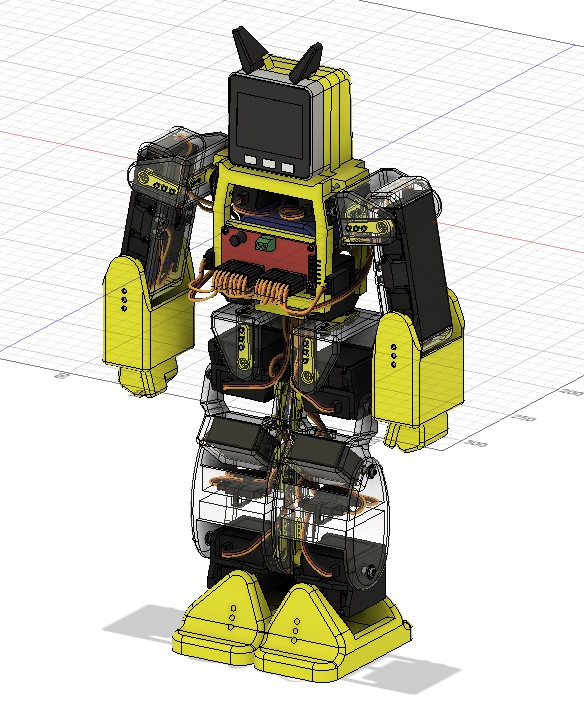
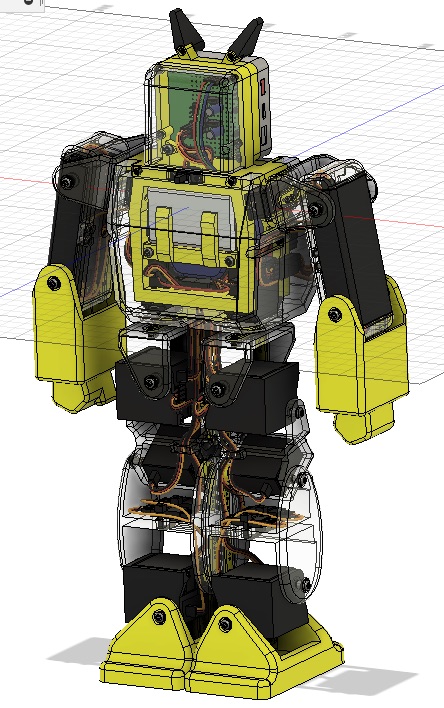
4. 構造設計
サーボを固定したり、ロボットの骨組みを作ったりコントロールボードを取り付けるフレーム類の構造物はアルミ板を切って曲げたものを使用したり3Dプリントした部品を使いします。以前は私はアルミ板を使用していましたがこれを使うのは結構大変なので今回は3Dプリントした構造物で製作することにします。アルミ板での構造物の作り方はまた別の機会に説明したいと思います。
そして3Dプリントした部品は3DCADを使って設計したいと思います。今回は3DCADはFusion360というソフトを使用しました。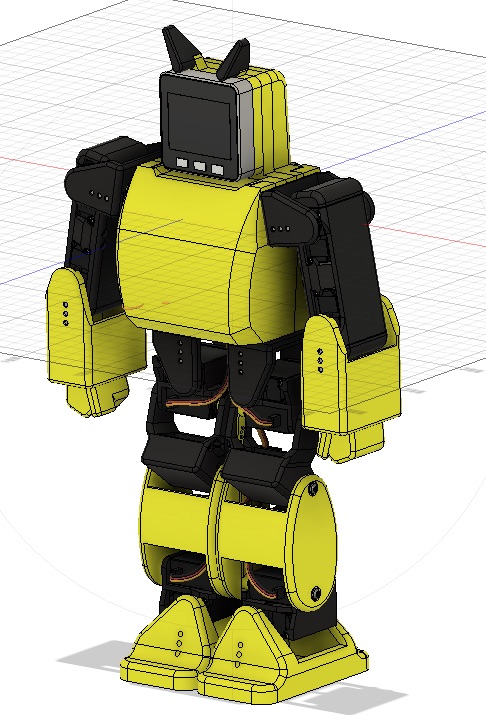
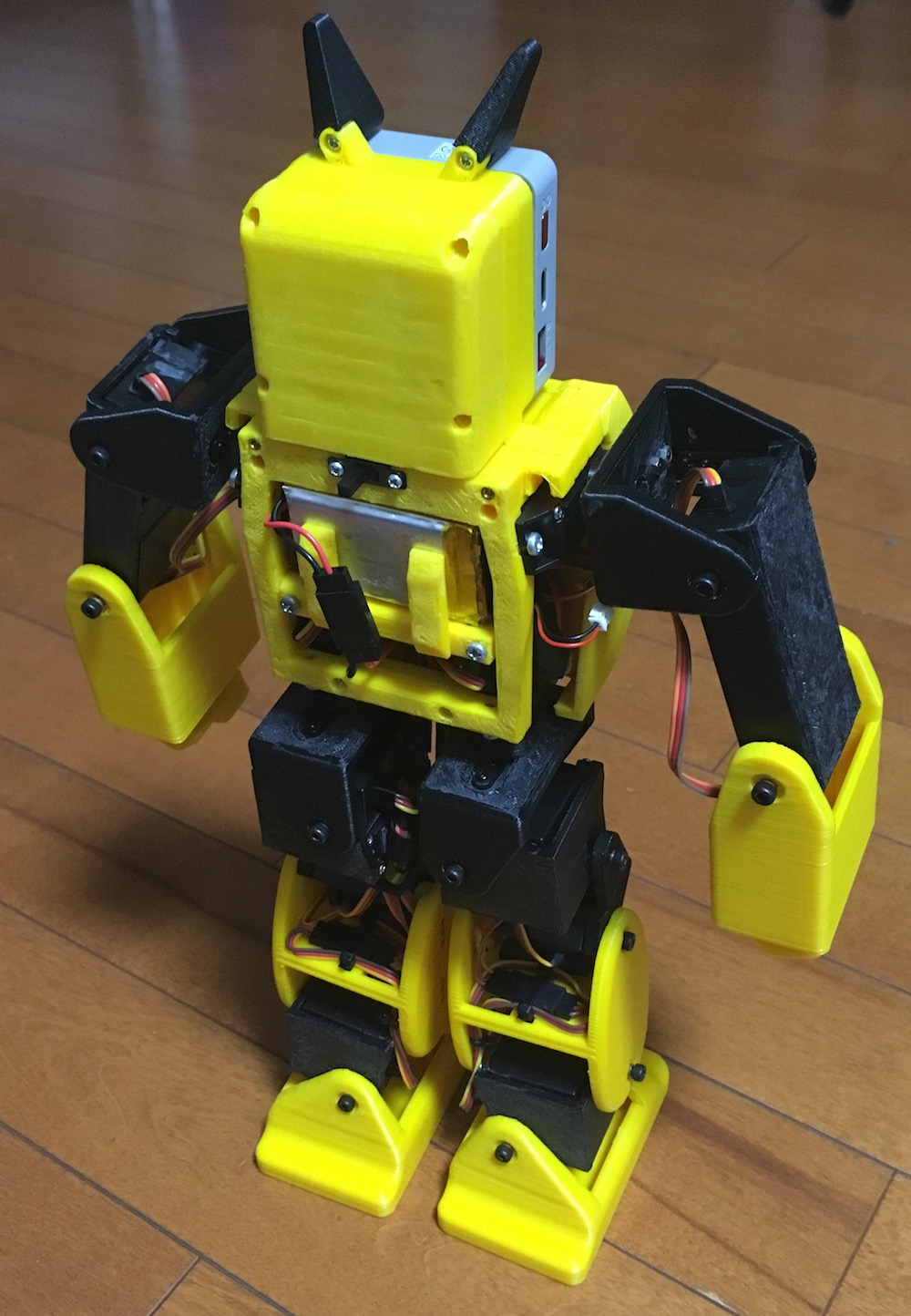
5. 組み立て
組み立て後はこんな感じです。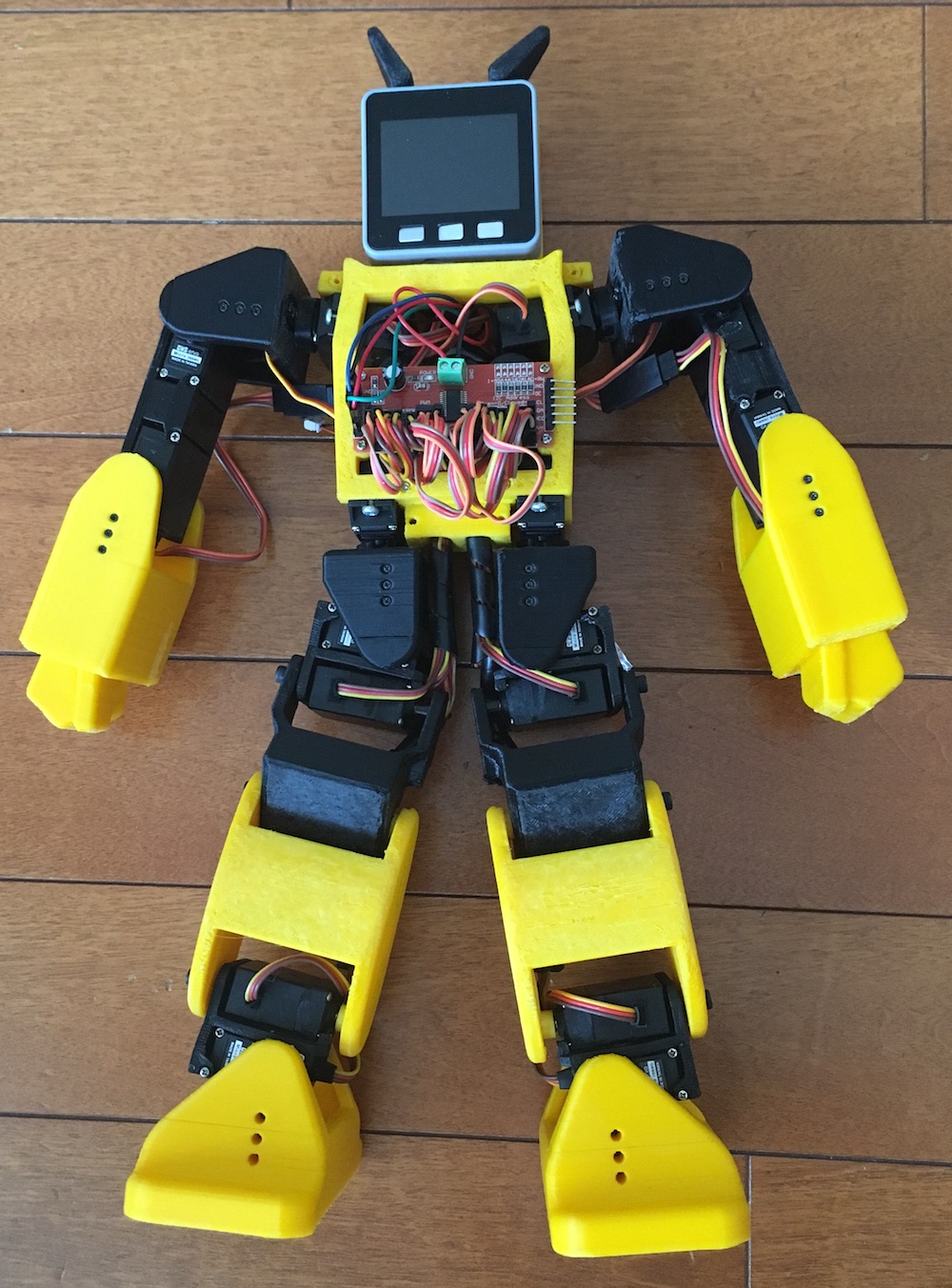
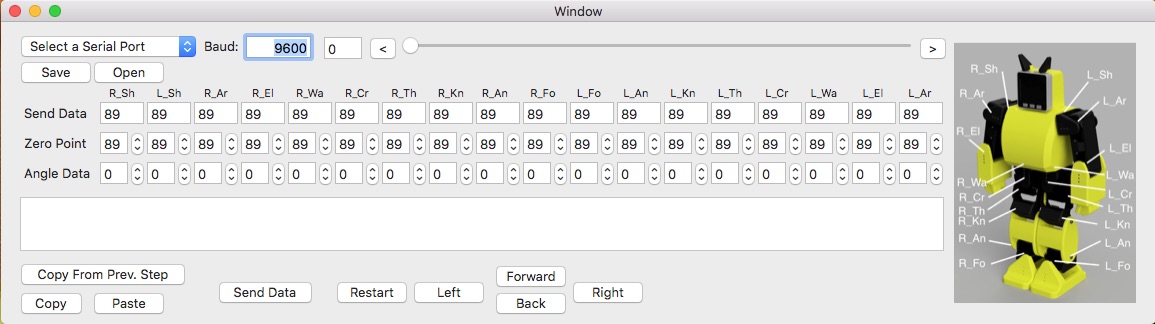
6. Mac側コントロールアプリ
ロボットの制御はMacから行います。Bluetoothで接続します。制御用のアプリはXcodeを使った自作です。
7. 動作
全身後進、左右ターン、左右スライドができます。
更新履歴
- 2019.8.18動画を更新しました。NEW
- 2019.5.19NX10 M5Stackで作る二足歩行ロボットのページを作成。